
ししかわです。
9/8(日)マイクロマウス東日本地区大会に出場しました。
私にとって初の大会参加です。
まず結果報告から。
- 無事に迷路を完走できました!タイムは 1分29.868秒 でした
- Pi:Co杯で優勝しました!(Pi:Co Classicを使って最速タイムを記録しました)
- 探索走行ではゴールまで行って帰って来れたのですが、最短走行は失敗してしまいました(後述)
以下、当日の様子を写真付きでレポートします。

迷路発表の瞬間。どんな迷路かは当日にならないとわかりません。
まだブログには書けていませんが、この日までにスラローム走行による探索(スラ探)を実装していました。
「スラ探で迷路を完走する」が今回の目標です。
競技場脇の練習用迷路で何度も調整し、今できる万全の体制で本番に望みました。
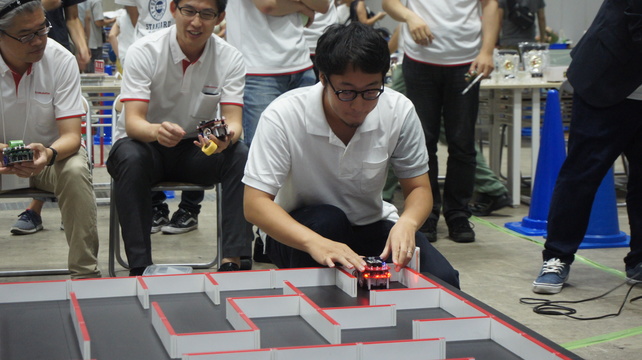
スタートの瞬間。緊張しました…
1回目の走行。私の不安をよそにPi:Co TARO(マウスの名前)は元気に迷路を走っていきます。
スラローム旋回が連続すると徐々に座標の誤差が蓄積してきますが、
- 袋小路で折り返すとき、バックして機体の後部を壁に合わせることでズレを矯正するハードウェア位置補正
- 直進時、左右の壁との距離が等しくなるように経路を補正するフィードバック制御
などの方法で自律的に位置を修正しながら走行します。
これらがうまく動いてくれたおかげで、無事にゴールまで行って帰ってこれました。タイムは1分29.868秒。
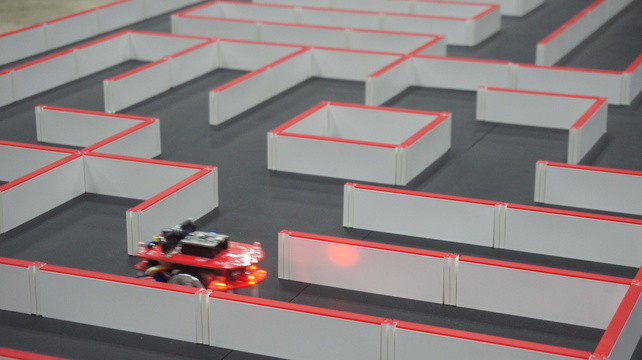
私の心配をよそに、私が作った「Pi:Co TARO」はなめらかに走ってくれました
1回目の走行が終わって、残り時間は約2分。
マイクロマウス競技では持ち時間(今回は5分)の間に5回走行して、最速タイムが記録となります。
最初は迷路を探索してマップを作り、残りのトライではマップから算出した最短経路を速く走る…という戦略が定石になっています。
探索は1発で成功した。あと4回トライできる。これなら最短走行もいける…!
と、最短走行モードで走らせ始めた矢先、ある直線で壁に向かって急加速し、衝突してしまいました。
あれ?途中でスリップした?モードを切り替え忘れた?あるいは直前の改修で、プログラムにバグが混入したか…?
タイヤのゴミを掃除したりして試しますが、何度走らせても同じところで壁にぶつかってしまいます。
ここで原因に心当たりが付いたのですが…
とき既に遅し。時間切れになってしまいました。
競技終了後、Pi:Co TAROが作った迷路マップをシリアル通信で確認しました。
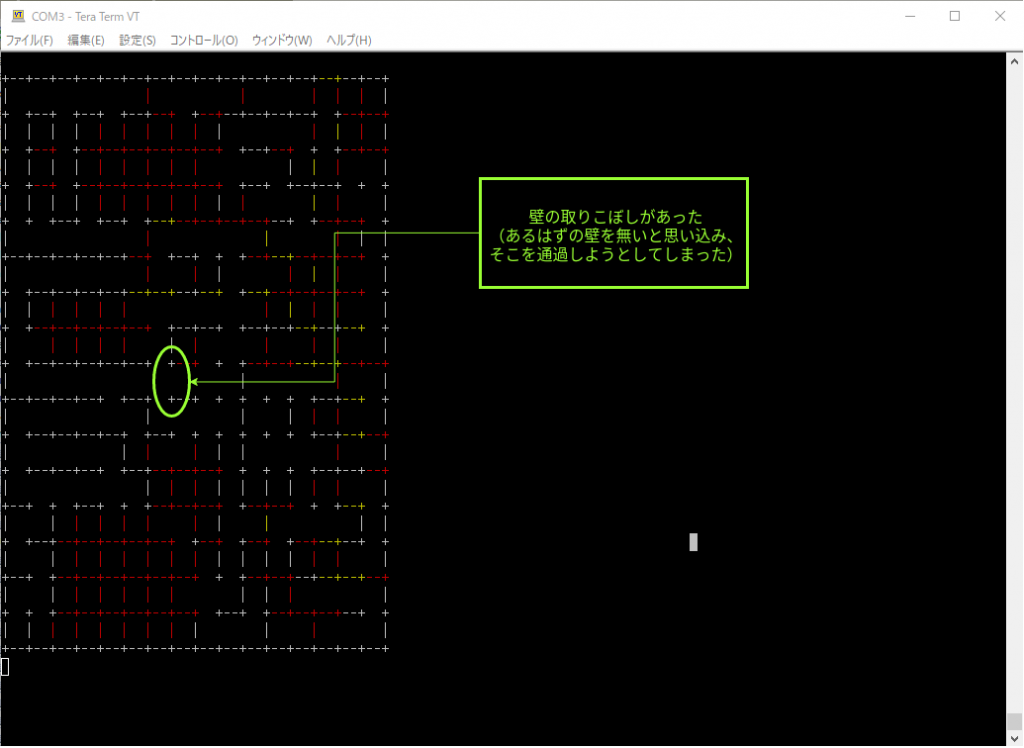
衝突の原因は壁の誤認識でした。壁のセンシングに失敗して、あるはずの壁を無いと思い込み、
そこを通過しようとしたために、正面衝突していたのです。
マップを見ると、他にも同じような壁の取りこぼしが何箇所かあるようです。
最短走行に失敗したのは悔しいですが、原因ははっきりしたので、次回に向けて対策を考えたいと思います。
それにしてもたった1箇所の認識ミスでこのようなトラブルが起きてしまうなんて、
想像以上にシビアで繊細な競技だな…というのを実感しました。
ともあれ無事に競技は終了し、探索時のタイムで完走認定をいただいたので、
11/30~12/1に行われる全日本大会への出場権を獲得できました!
もう一つ嬉しい報告ですが、なんとPi:Co Classicを使った出場者の中でタイムを競う「Pi:Co杯」で優勝しました!
副賞の「焼きペヤングメーカー」もいただきました!なぜ焼きペヤングメーカー…?
ということで、既に全日本大会には出られるのですが、
アールティの社員は研修の一環として、各地区大会への出場が義務付けられています。
全国行脚しながら「大会に向けたスケジューリング/マネジメント能力」「本番での対応力」「技術者の繋がり」などを養えるので良いですね。
次回は北信越地区大会に出場します。
次は最短走行も成功させたいです!