
こんにちは。アールティの加藤です。
本連載ではオリジナルのマイクロマウスを製作する研修(自作マイクロマウス研修)について書いていきます。前回の記事では機体製作の計画を練りました。今回はギア比の計算と部品選定、回路ブロック図の作成について書きます。
マイクロマウス学習キットPi:Co Classic3を使用した研修の連載はこちらです。
ギア比の計算
まずは製作する機体のギア比を計算しました。詳しい計算方法については以下のしおたにさんの記事をご覧ください。

また、ギア比を決定するにあたって以下のhayashiさんの記事も参考にしています。

機体のパラメータは以下のようになりました。しおたにさんの記事によると、大会の上位陣の機体は速度5[m/s]程度、加速度は20[m/s/s]程度に設定されているらしいです。それに対して私の機体は安定して走行できることを目標としているため、比較的ゆっくり走行できるように速度と加速度を設定しました。使用するモータはマイクロマウスでよく使われているファウルハーバー製の1717T006SR-6Vです。
- 速度 : 2 [m/s]
- 加速度 : 5 [m/s/s]
- 重量 : 0.1 [kg]
- トルク定数 : 0.00396 [Nm/A]
- 逆起電圧定数 : 0.000414 [V/rpm]
- 電源電圧 : 7.4 [V]
- 端子間抵抗 : 4.3 [Ω]
- タイヤの半径 : 13 [mm]
- 減速比 : 3.75
これらの走行パラメータにおける計算結果は以下のようになりました。Duty比は0.8以下にしておくと良いとのことなので、このパラメータの構成で機体を製作しても問題なさそうです。
- 回転数 : 5509 [rpm]
- トルク : 0.00087 [Nm]
- Duty比 : 0.44
- 電流値 : 0.22 [A]
そしてこの計算結果をもとにして、ギア比は以下のように決定しました。
スパーギア : ピニオンギア = 45 : 12
部品選定
機体のパラメータが求められたので、次は機体の部品を選定しました。基本的には社内研修用に作成された板Pi:Coの構成を参考にしています。ただし、私の機体で使用するマイコンは板Pi:CoのRX631ではなくSTM32マイコンにしようと考えているので、同じくSTM32F405RGT6を使用している鍬形さんの機体構成やhayashiさんの機体構成も参考にしています。
選定した部品は以下の通りです。
まず、先ほど決定したギア比に従ってギアを選定しました。
また、先ほど求めた走行パラメータに従ってタイヤやモータ、ホイールを選定しました。
- モータ : 1717T006SR-6V
- タイヤ : MZW2-20B
- ホイール : MZH131W-N25
STM32F405RGT6はマイクロマウス競技でよく使われているとのことなので選定しました。残りの部品も板Pi:Coや鍬形さんの機体で使用されているものを選定しました。
- マイコン : STM32F405RGT6
- ジャイロセンサ : ICM-20649
- モータドライバ : DRV8835
- エンコーダ : モータとセット
- 赤外線センサ : OS5RKA5111A
- フォトトランジスタ : ST-1KL3A
スケッチを作成して干渉チェック
選定したギアやタイヤ、モータが物理的に干渉しないか、Autodesk Fusionのスケッチを作成して確認しました。また、このスケッチを今のうちに作成しておくと、このあとモータマウントを設計するときにも役立ちます。
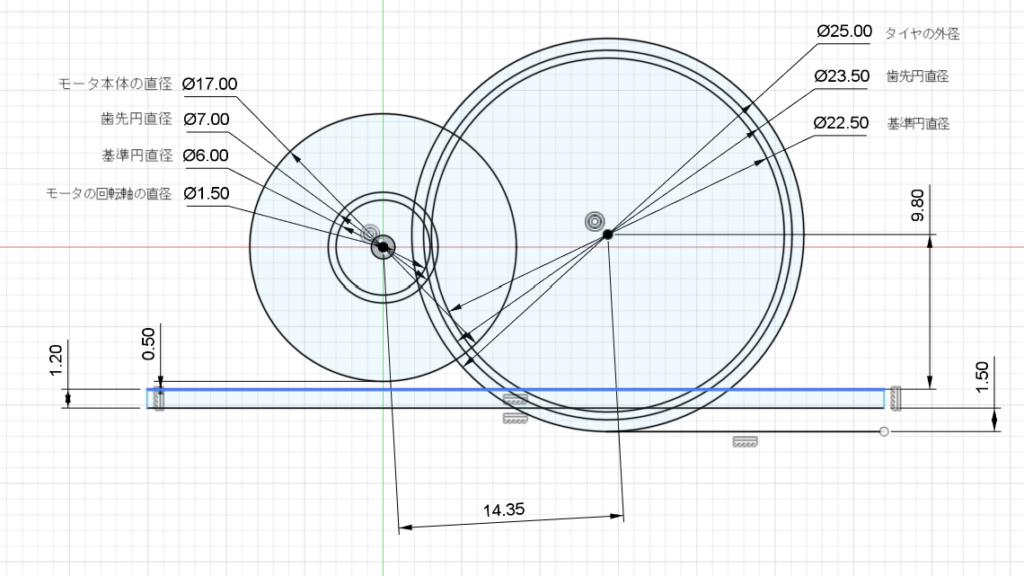
干渉チェック用のスケッチ
スケッチ作成時に必要となるピニオンギアとスパーギアの軸間距離は、以下の式から14.35 [mm]と計算できます。
\begin{align}
\frac{6.0 + 22.5}{2} + 0.1 = 14.35
\end{align}
計算に必要なそれぞれの値は以下の通りです。
- ピニオンギアの基準円直径: 6.0 [mm]
- スパーギアの基準円直径: 22.5 [mm]
- バックラッシ調整: 0.1 [mm]
バックラッシの調整については以下の鍬形さんやしおたにさんの記事を参考にしました。

機体の重心をできるだけ下げるために、モータは基板から0.5 [mm]だけ浮くようにしました。基板の厚みは軽さと強度の兼ね合いを考えると、1.2 [mm]が良いらしいです。また、クラシックマウス競技の迷路は最大1.0 [mm]の段差が生じるので、地面から基板までの高さは余裕をもって1.5 [mm]としました。
スケッチを作成したことで、スパーギアがタイヤを飛び出していないことや、タイヤがモータの回転軸に干渉していないことを確認できました。選定した部品で問題なく機体を作成できそうです。
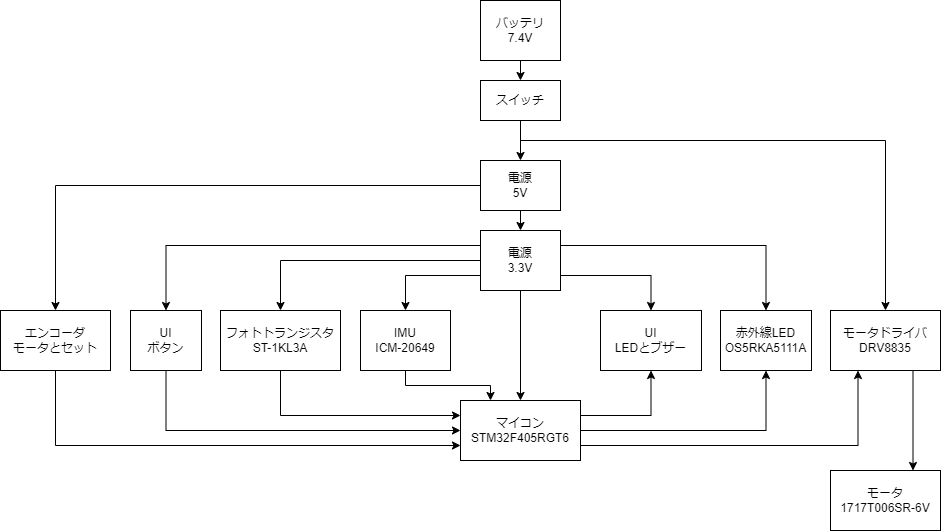
回路ブロック図
主要な部品の構成が決まったので、回路のブロック図を作成しました。電源や入力、出力の関係が分かるように、主に必要となる部品をまとめました。また、ブロック図を描く際は入力となる部品を左側に、出力となる部品を右側に配置すると見やすくなります。
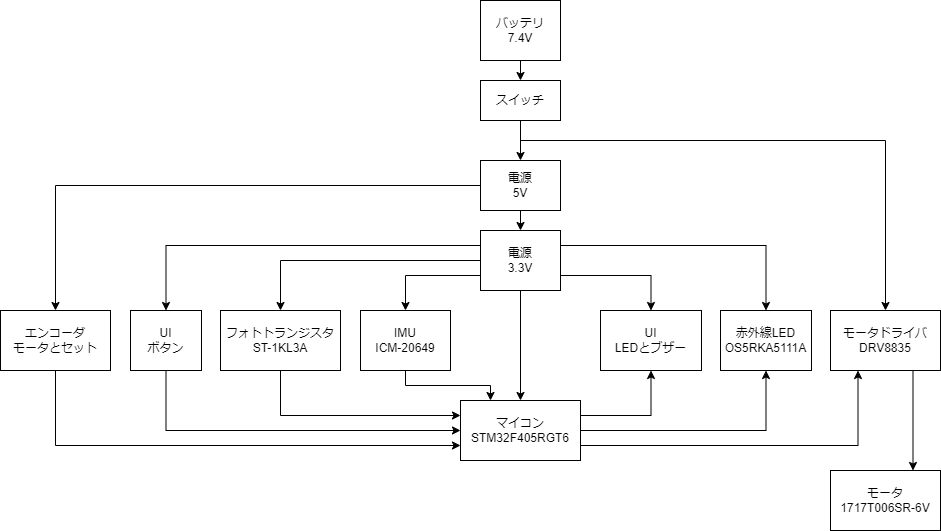
回路ブロック図
おわりに
本記事ではギア比の計算と機体の部品選定、回路のブロック図の作成を行いました。今回の作業で機体を製作する下準備が完了するところまできました。次回からはいよいよ回路設計と機体設計を行います。電子回路もハードウェア設計も大学の講義で少し学んだ程度でほぼ素人ですが、本研修を通して勉強していきたいと思います。それでは、また。