
こんにちは、しゅうです。
今回は引き続き基板設計の修正をしていきます。
回路・基板修正 その2
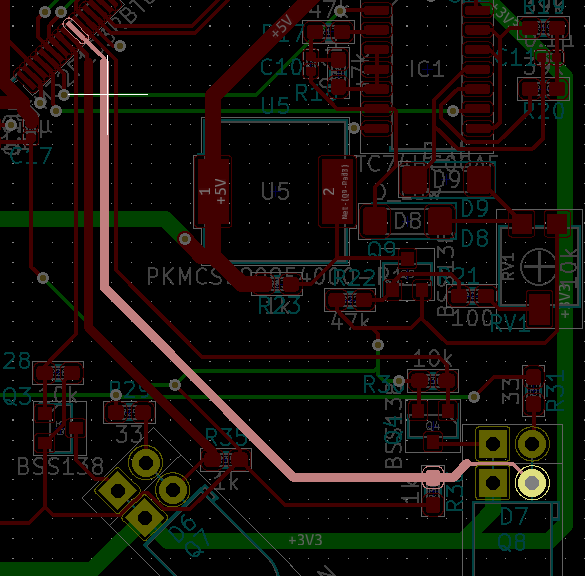
光センサからのアナログ線
少し距離があり、太くしたほうが多少ノイズに強くなるので安心です。ないよりマシ!ってやつですね。
下の画像のように、信号線よりも少し太い、0.6mmになりました。このままマイコンのピンに接続すると、他のピンに干渉してしまうため、手前で配線を終わらせて残りを細い線で接続します。
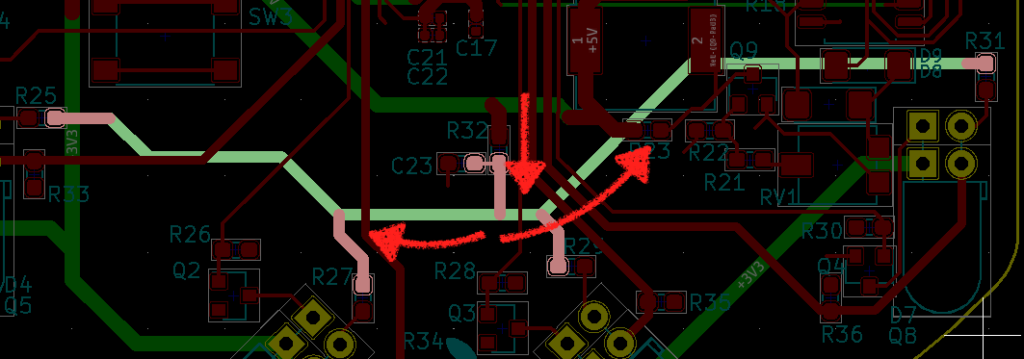
光センサへの電源供給
電源が供給される点から素子までの点が端から端へと行っているので、現状だとD7が若干暗くなるかもしれないです。
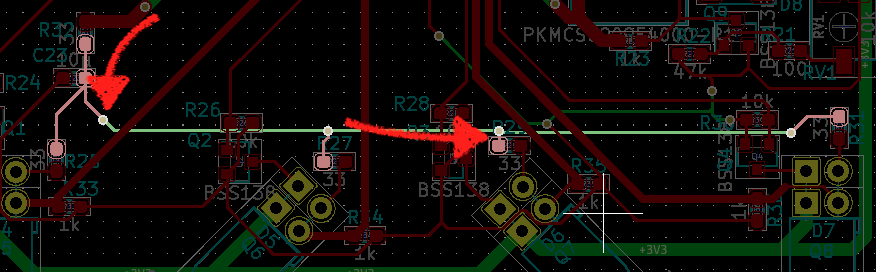
そこで、電源供給を始める点を真ん中にして、左右に分岐するように配線を整えます。
放熱
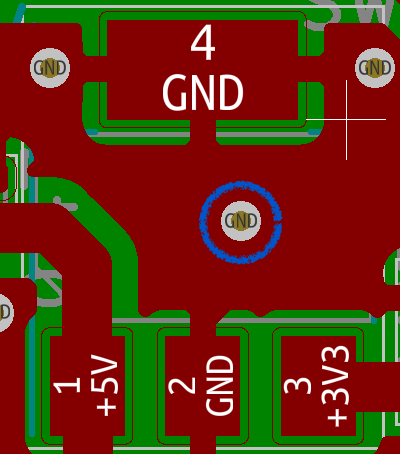
モータドライバ用の熱対策は行いましたが、レギュレータの熱対策もしておく必要があります。下の画像のように、ベタGNDを作ってあげたりVIAを通しておくと良いです。
コイル
今回選定したコイルでは、定格電流が足りないことがわかりました。
改めてデータシートを見てみると定格電流が0.03Aでした。回路図に残しておいた計算式によれば0.8Aほどは流れるので全然足りないですね…!!
部品選定中、必要なインダクタンス量しか見てませんでした。と言うことで別のコイルを選定します。安全を考慮して2Aほど流せる様にすると良さそうです。こちらのコイルが良さそうですね。
少しサイズが変わるので、フットプリントを作ったり調整したりと追加対応が必要そうです。
基板外形
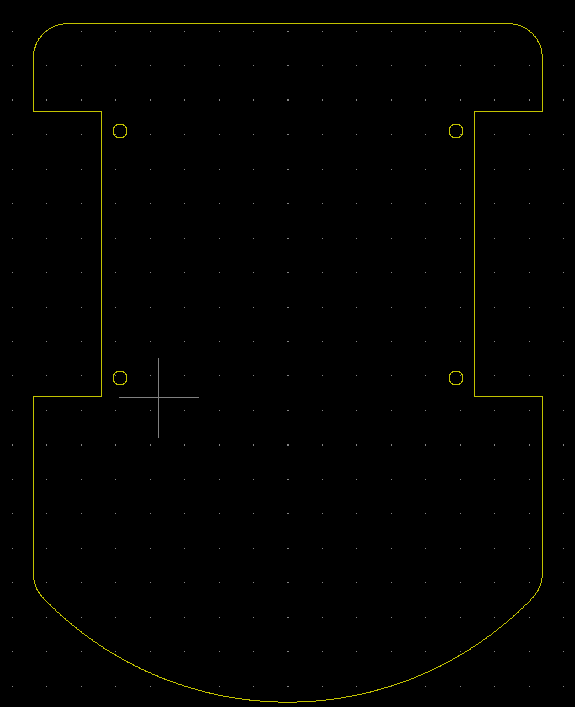
現状の長方形の車体だと、袋小路に入った際にロボットが旋回するときの余裕があまりないです。当初考えていた中心半径が少し後ろにずれました。
そこで、車体の前方を円形にします。このついでに、角を丸めておきます。
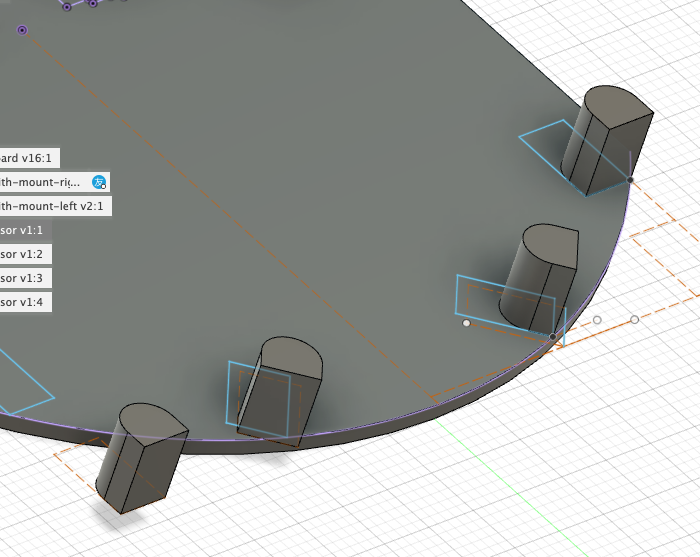
角は5mm丸めています。
後ろにずらした分、素子などの配置調整も行なっていきます…!!
まとめ
今回はここまで。次回も引き続き修正作業を2,3点行う予定です。