
こんにちは、しゅうです。
新年度になっちゃいましたね…!引き続き頑張って自作マウスを作っていきますっ。
今回はKiCADから離れて、メカ設計のお話をします。
part26でマウス本体やモータマウント設計の様子をお見せしました。
今回はホイールに取り付けるギアについて考えていきます。
情報まとめ
ここまでで決まっていることを、下記の表に示します。また、最大速度や加速度など、追加でとりあえず設定している値もあります。
| 部品名(要素) | 単位 | 値 |
|---|---|---|
| ピニオンギア(歯数) | T | 14 |
| ピニオンギア(基準円半径) | mm | 7 |
| ピニオンギアとホイールギア(モジュール) | mm | 0.5 |
| 車体重量 | kg | 0.1 |
| 最大速度 | m/s | 3 |
| 最大加速度 | m/s^2 | 10 |
また、今回使用するモータの特性(データシート)も減速比やデューティ比の計算に使います。
減速比とデューティ比
使用するモータの特性や設定した目標速度などのパラメータをまとめるために、エクセルに情報を記載していきました。今回はデューティ比を出力トルクから求めることとします[1]。
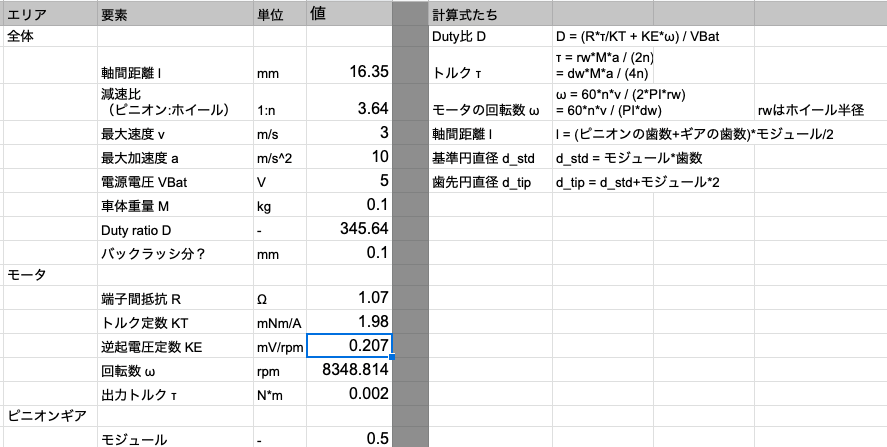
今回は、減速比の1:n(ピニオンギア対ホイールギア)が3.5~4の値を取るように設定しようと考えました[2]。さらに、ギアの消耗具合をちょっと気にして、ピニオンギアとホイールギアの歯数がお互いに素となるように設定しようと考えました[3]。
すなわち、ピニオンギアが14、ホイールギアが51として、減速比が3.64となりました。これに加えて、最大速度・加速度、モータの特性などを用いて計算するとデューティ比が345.64となりました。
あれ?デューティ比は、0から1の値を取るはずでは……?!!?
計算式を見直したり、単位が合っているか確認したり、半日悩んでいたら同僚から以下の指摘をいただきました。
???「逆起電圧定数のmってミリなので、それを1/1000にすると良さそうだよ」
本当だ…!ミリボルトをボルトに直す必要がありましたね、見落としていました……
と言うことで再度計算したら、デューティ比が0.35となったのでそれっぽい値が出るようになりました!
まとめ
思いの外考え込んでしまったので本日はここまで。
次回はモータマウントの設計の様子を紹介していこうと考えてます。
以下は今回参考にした記事と再度パラメータなどをまとめた表になります。
参考
[1] DCモータを使ったマイクロマウス入門?
[2] ギア比を計算したい?:マウス研修(しおたに)26
[3] ギア比を計算したい?:マウス研修(しおたに)27
パラメータまとめ
| 部品名(要素) | 単位 | 値 |
|---|---|---|
| ピニオンギア(歯数) | T | 14 |
| ピニオンギア(基準円半径) | mm | 7 |
| ホイールギア(歯数) | T | 51 |
| ピニオンギアとホイールギア(モジュール) | mm | 0.5 |
| 減速比 1:n (ピニオンギア:ホイールギア) | – | 3.64 |
| 車体重量 | kg | 0.1 |
| 最大速度 | m/s | 3 |
| 最大加速度 | m/s^2 | 10 |
| デューティ比 | – | 0.35 |