
時間がかかりました。
みなさんこんにちは、YUUKIです。
更新頻度を上げれるように頑張りますと宣言してから1か月過ぎてしまいました。
外も寒くなってきて、街中ではすでにクリスマスツリーが・・・
いったい何をしていたんだと怒られそうですが、大規模な進路変更があり、各種機能の動作チェックを中断しfusion360にてマウスの設計を行っていました。
その進路変更も含め、約1か月何をしていたかの進捗を書いていこうかと思います。
3月には動くようにしておかないとまずい?
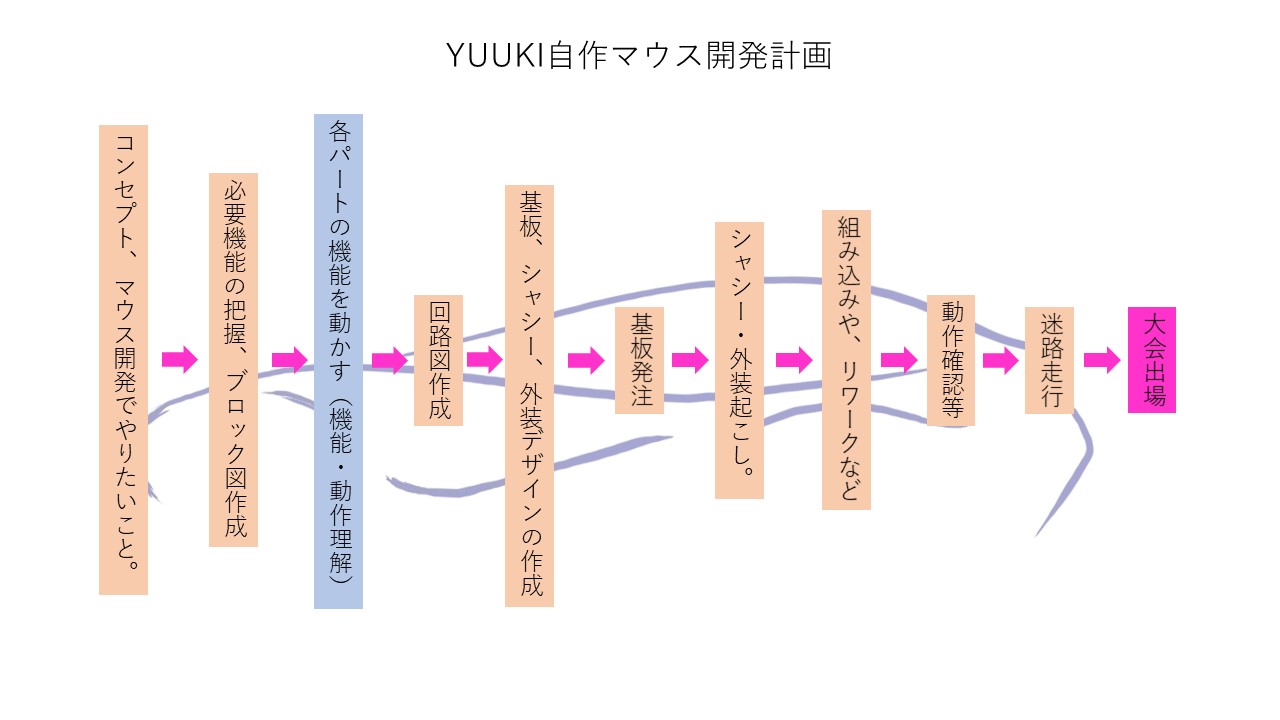
YUUKIの自作マウス作製記でちょくちょく登場するこの予定表通りいくと動作理解に時間を使っていたのでAD変換あたりをやっていこうかと思っていました。個人的には研修ということもあってここはしっかり時間を使ってある程度理解しておかないと後々詰まるだろうと、調べ調べ作業していました。
しかし、来年の3月のマイクロマウスの大会に出場する的な話が浮上し、大雑把に逆算しても今のペースじゃ動かすどころか手元に完成品があるかすら危うい…
ボディーや空力をデザインするなんて言ってられないということでここで大きく軌道修正します。
・空力デバイスの実装
・最低地上高を5?。
・ホイールベーストレッド比1.55
を実装すると宣言していましたが、この空力デバイスを外します。最低地上高5?とホイールベーストレッド比1.55を満たしたマウスをfusion360にて設計してとりあえず上記条件が満たせるか、サイズ感、基板やバッテリーを置くスペースなどを検討していきたいと思います。
上記開発計画は以下のように軌道修正します。

これ通りにうまくいく可能性が低いのでまた更に改がどこかでできそうな気もします。
回路図、基板発注は諸先輩方のものをがっつり参考に勉強したいと思いますので少し期間は短めです。(ずるずる伸びそうですが、ソフトと走行で苦戦するのがPi:coで痛感してるのでそこに少しでも時間が欲しいのです)
とりあえず3月には走るマウスが手元にあることを祈りつつ頑張ります。
ベース機体完成後、あとは車と同じようにコツコツチューニングしていく形で本来イメージしていたマウスへと近づけようと思います。
マウスデザイン完成まで
さて軌道修正についてはここまでにし、マウスのデザインをfusion360で行ったのでこちらについて紹介していきます。
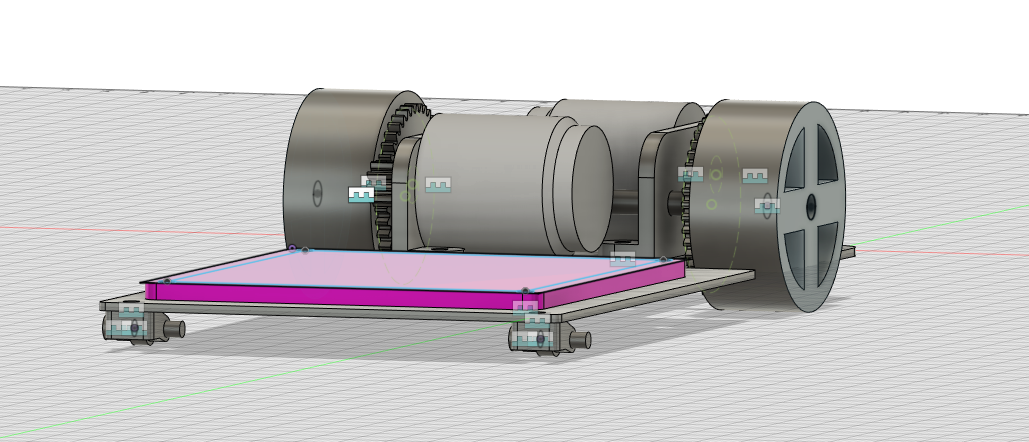
一先ず現段階の完成予定画像がこちらです。
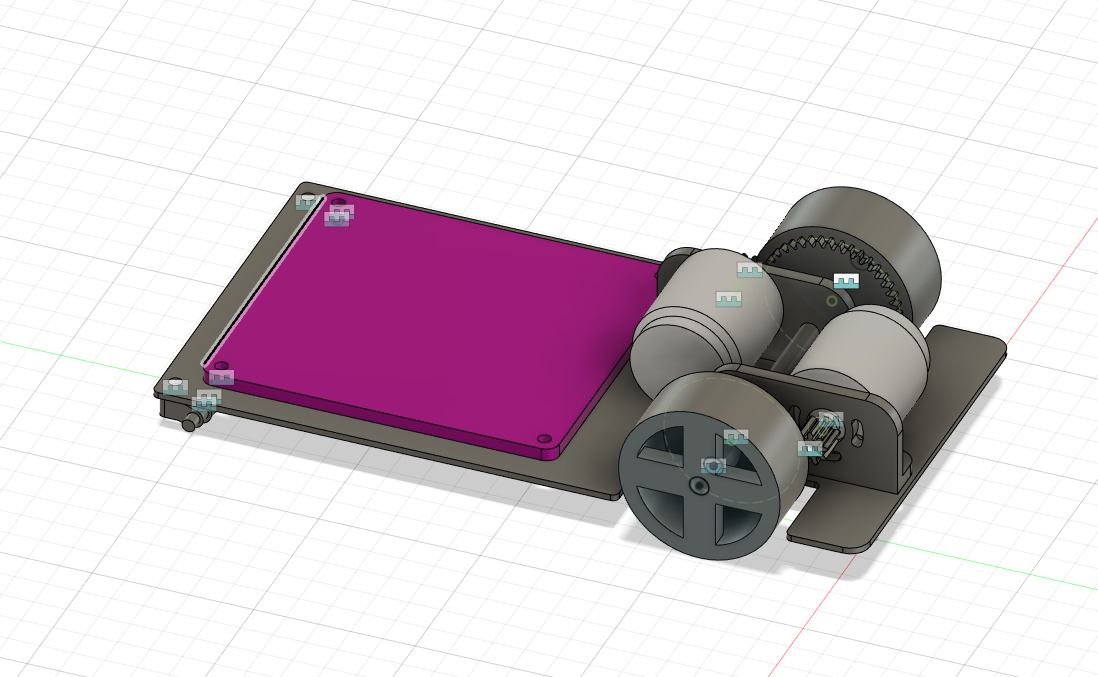
2輪駆動の補助輪付き4輪です。(場合によっては普通の2輪になるかもです)
現状、上述した「最低地上高5?」「ホイールベーストレッド比1.55」を満たしています。
バッテリー置くところですがこの形状だとフロントが軽すぎる気もするのでフロントの基板の上あたりに置けるようにステーの製作を考えていますがこれは、ベースとして完成した後のアップデートで追加したらいいかと思っています。
みなさんモーター等の重たいものを極力低い位置に置き低重心化する努力をされていますが、これも後々のアップデートで変えていきたいと思います。
次回fusion360で作成した際のことを書いていこうと思うのですが、インストールや基本操作等については弊社の諸先輩方の参考にした記事をご覧いただくとして、ほぼ3D のモデリング初心者が何に躓いて時間をかけたのかを紹介していければと思います。
一先ず今回はここまで!
YUUKI