
こんにちはショウです。前回の最後に部品選定を書くと言ってから間が空いてしまいましたが、今回の内容は部品選定ではなく全日本大会の出場した話です。
いきなりですが今回走行した機体はこちらです。

ブログを書いていない間にもマウスは進めていたため、いきなりの機体完成です。
機体名は班渠2 去年の機体から名前を引き継いでます。
大会について
今年はコロナの影響で地区大会も中止になり、全日本大会も人が集まらないオンライン競技での実施になりました。
ルールなどは大会HPに書かれています。
今年のマイクロマウスの課題迷路は以下のような迷路でした。
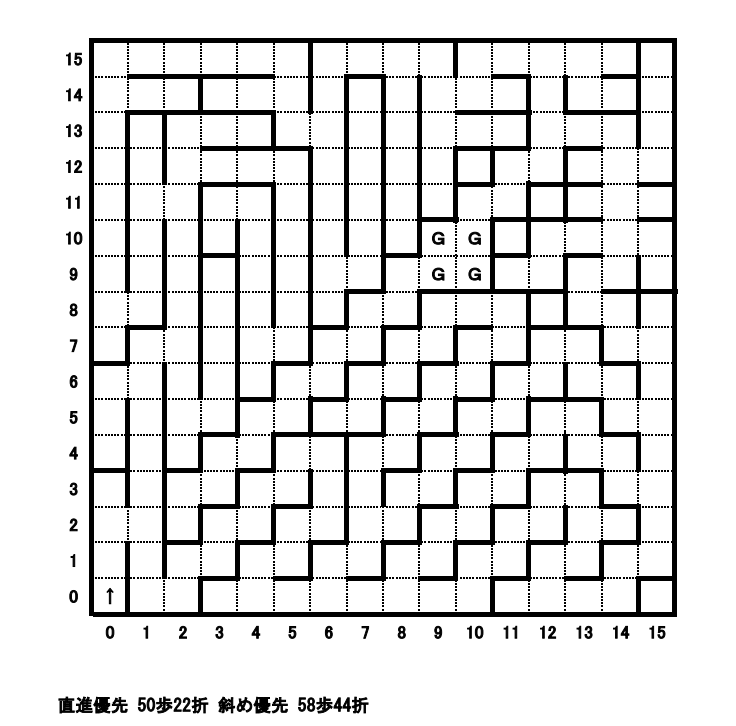
この迷路は2018年の学生大会のマイクロマウス競技の迷路と同じもので、南回りは斜めが多く、西廻りは斜めが少なく直線が多い迷路でした。
特徴としてはゴールから先に斜めの長い袋小路があり、最短走行時にゴールを突っ切ることでタイムが早くなる迷路でした。
大会結果
走行動画です。
第1走行:01:24:858
第2走行:00:14:784
第3走行:R
スラローム探索(壁当て多用)とスラローム最短をしました。
なんとかギリギリで完走しています。
4走目以降は間違えて機体電源を落としてしまい、フラッシュの実装ができておらず、迷路情報が消えてしまい、走行させることができませんでした。
実はこの走行動画撮影日に初めて迷路調整ができる状態になったので、調整不足が甚だしくなんとなくのパラメータを入れることしかできませんでした。
今後について
ブログに関しては途中が書けていないので、次回から部品選定に戻ってブログの続きを書いていきたいと思います。
一応研修の終了条件のスラローム完走は達成していますが、吸引ファンもこだわって設計しているので、吸引走行までは作成し、ブログに上げたいと思います。
一言:家に迷路がほしいです。