
d-satoです。初日から在宅勤務のため、自宅でマイクロマウス研修に取り組んでいます。記事一覧はこちらです。今回は練習基板とPi:Co Classic3を組み立てます。
練習基板の組み立て
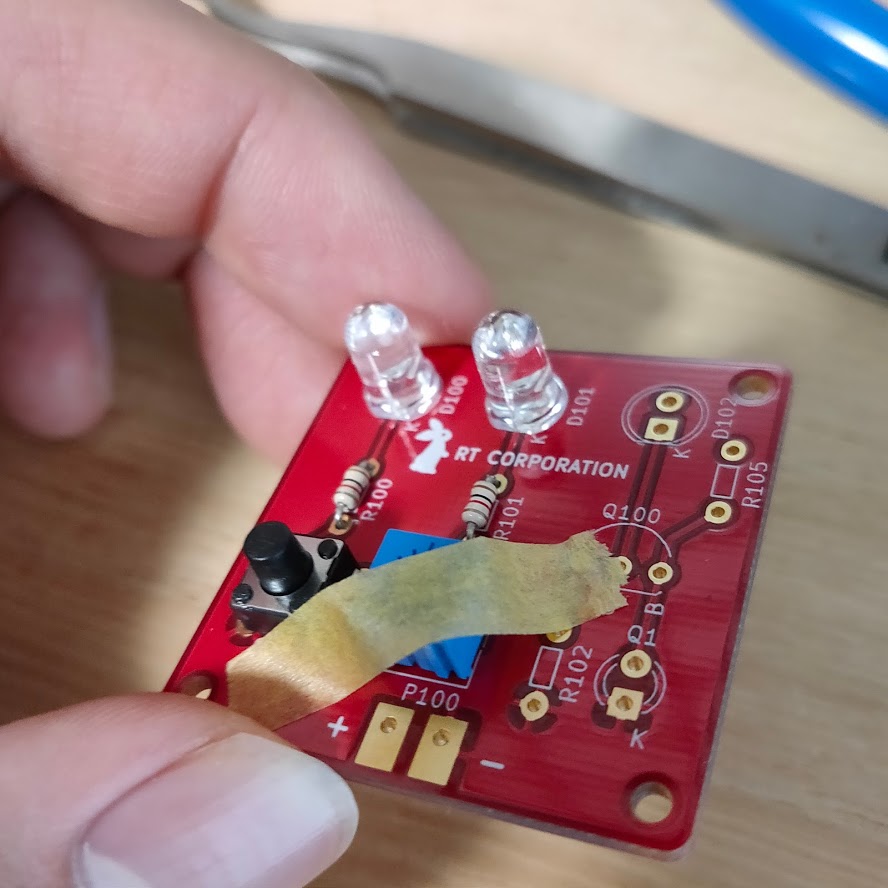
Pi:Co Classic3のキットは、はんだ付け初心者でも安心して組み立てができるよう、ロボット本体の組み立ての前に練習基板を組み立ててはんだ付けの練習ができます。練習基板は3つのLEDを点灯させる回路です。
単3電池が2本必要なので用意しておきましょう。私の場合は、単3電池のストックがなかったのでパソコンにつないでいるワイヤレスマウスの電池を一時的に使いました。
練習基板の組み立てに必要なのは、前回準備した工具と以下の部品です。
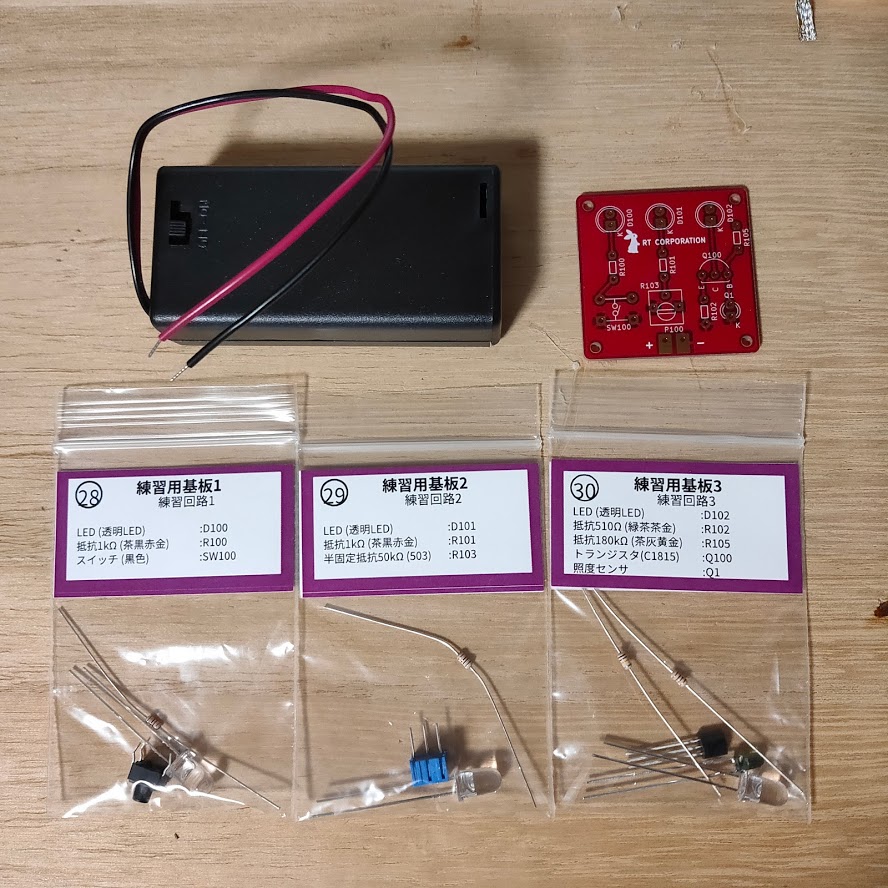
部品を用意して適宜マスキングテープ等を利用しながらはんだ付けしていきます。組み立てに関する詳しい話は製品購入後に入手できるマニュアルに書かれていますので、そちらに説明は譲ります。
無事組み立てができると、LEDが点灯することを確認できます。

Pi:Co Classic3の組み立て
練習基板の組み立てではそれほど多くの部品を使用しませんでしたが、本体の組み立てには多数の部品を使用します。部品点数は練習基板よりも多いですが、小袋に番号が振られていて、マニュアルを読みながら番号順に部品をはんだ付けしていけば完成するようになっているので迷わずはんだ付けできると思います。
電源基板


メイン基板


センサ基板


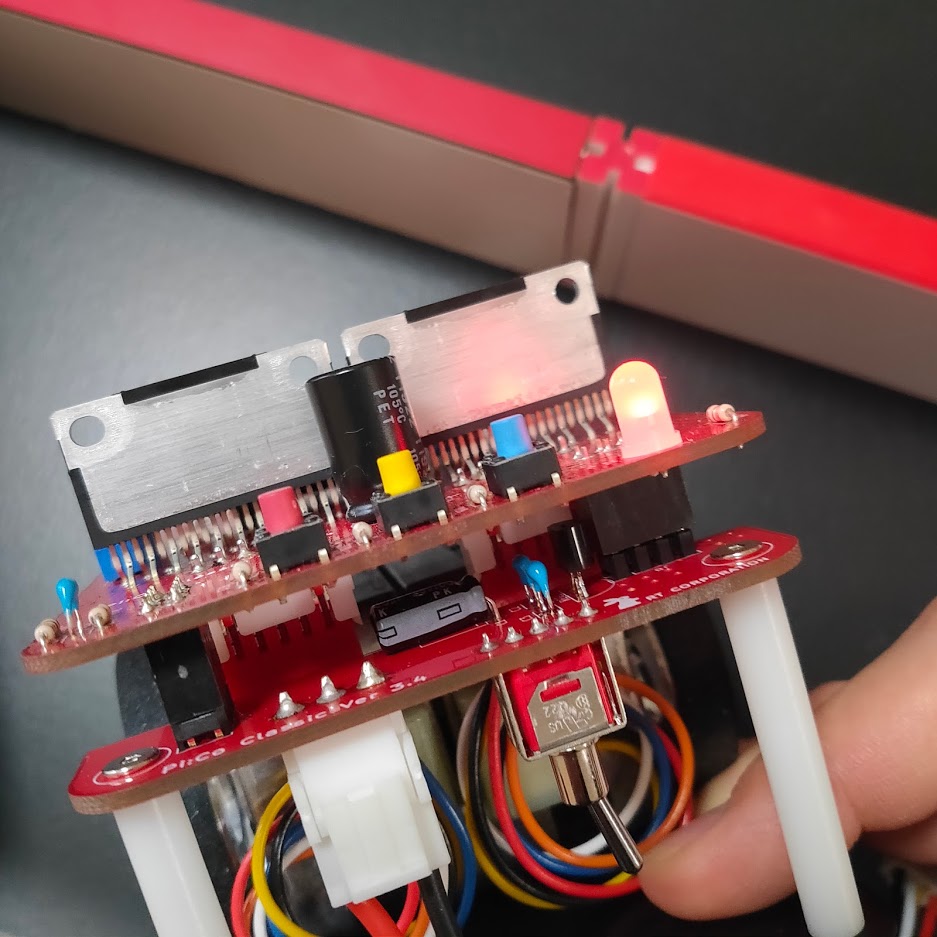
動作確認
組み立てができたら動作確認をします。マニュアルを見ながら、はんだ付けがきちんとできているか、忘れている部品はないか、ショートしてそうなところはないか目視で確認した後、電源を入れます。
無事LEDが光り、問題なく組み立てできていそうです!
次回はサンプルプログラムを使用して実際に迷路内をスタートからゴールまで走行させてみます。