 ショウのマイクロマウス研修
ショウのマイクロマウス研修 ショウのマイクロマウス制作-Part11
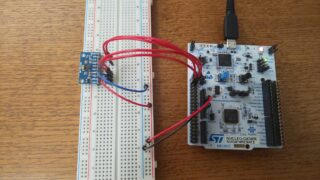
こんにちはショウです。前回は連続でAD変換をやりました。今回はエンコーダやジャイロセンサと通信するために使用するSPI通信を行います。今回はMPU9250モジュールを使って動作確認をします。
 ショウのマイクロマウス研修
ショウのマイクロマウス研修  マイクロマウス研修~お掃除マウス編~(岩本)
マイクロマウス研修~お掃除マウス編~(岩本)  いしかわのロボトレース研修
いしかわのロボトレース研修  しゅうのマイクロマウス研修
しゅうのマイクロマウス研修  NABEのロボトレース研修
NABEのロボトレース研修  いしかわのロボトレース研修
いしかわのロボトレース研修  ESP32マウス(shota)
ESP32マウス(shota)  マウス研修(しおたに)
マウス研修(しおたに)  しゅうのマイクロマウス研修
しゅうのマイクロマウス研修  しゅうのマイクロマウス研修
しゅうのマイクロマウス研修