

こんにちは
まえけんです。
今回は前回記事で拳げた問題点を解決するための解決策を上げていきたいと思います。
まずおさらいで、前回挙げた改良点を書いておきます。
主に改良したいところは次の4点です。
・エンコーダサブ基板のマウント方法
・サブ基板のはんだ付け方法
・インターフェース
・見た目
ちなみにこれに加えてバッテリを置く際に
斜めになってしまうという問題点も2作目ではあったので追記しておきます。
・エンコーダサブ基板のマウント方法
・サブ基板のはんだ付け方法
この二つはL字ピンヘッダを用いる事と
もう一つの基板で挟むことで位置決めをします。
言葉だとわかりにくいので(ブログ上ではまだ出来てませんが)
実機の写真で説明いたします。

これによってエンコーダ基板の位置に再現性が生まれ
はんだ付けしやすくなるのではないかと考えました。
また、基板をモータマウントの上部に渡すことで車体全体の剛性を高められる事と
触って壊れやすいエンコーダ基板をガードすることが出来るため
製品として誰が触っても安心な車体になるのではないかと考えました。
・インターフェース
インターフェースに関しては先ほど登場した
モータマウントの上部に渡した基板をインターフェース基板と
することで解決しました。
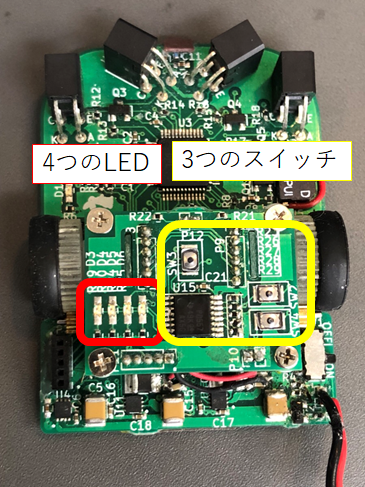
写真のように新たにLEDを4つとスイッチを3つ付けたことで
Pi:Co Classic3と同じ数のインターフェースとしました。
また、このインターフェース基板にエンコーダ基板を接続することで
メイン基板へのDIP実装点数が減り、配線面積を稼ぐことが出来ました。
また、ブザーを設置しました。
・見た目
・バッテリスペース
これらに関してはインターフェース基板を付けたことで
モータ配線が隠れ、全体がまとまった印象となりました。

また、基板の前方を数mm伸ばしたことで
バッテリを置くスペースが確保できました。
3作目の主な改良点としては以上です。
次回ですが、本業の方が忙しくなってしまったため
2,3週間程度ブログの更新をお休みさせていただきます!
いつも見て下さってる方々には申し訳ないですが
しばらくお待ちください!
ちなみに別のサイトでは二足歩行ロボット研修のブログも連載しております!
こちらもぜひご覧ください!