
はじめに
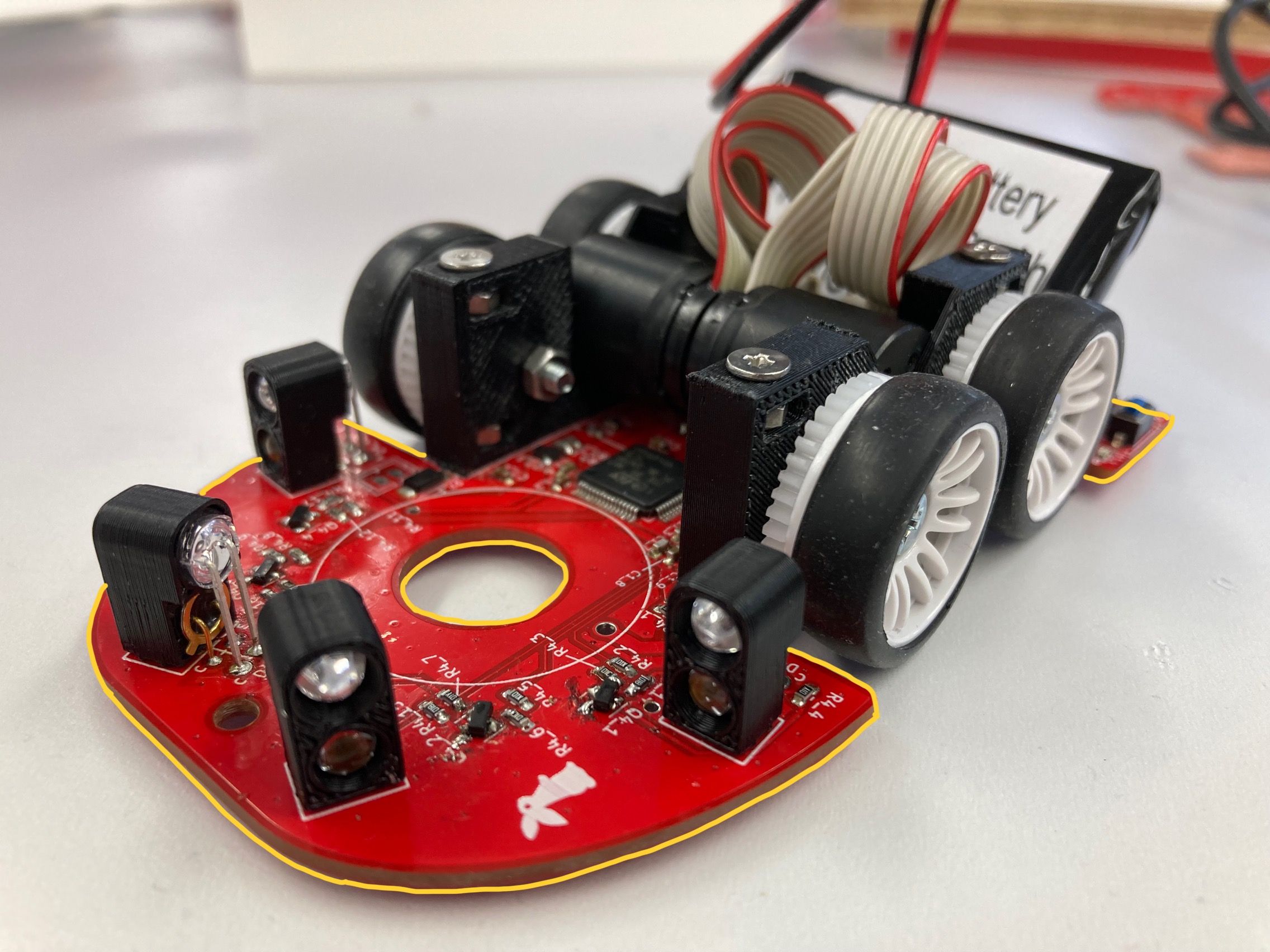
お久しぶりです。倉澤ズズくんです。前回の回路設計に続き、今回は機体の設計をします。既に機体の実物が手元にあるため、完成後の画像も交えつつ解説していきます。

車体外形の決定
今回は板マウスなので、基板自体が車体になります。
縦横幅の決定
車体の寸法を決定します。
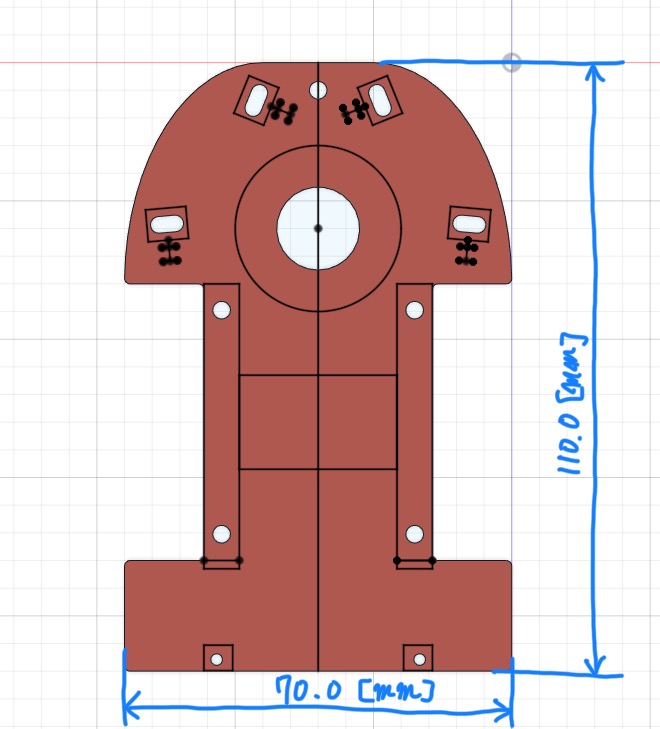
横幅
横幅は70.0[mm]にします。極力狭くしたいので足回りユニットを並べた際に極力短くなる距離で、基板に設けるモータマウンタ固定用穴の工作精度やモータ自身の公差を考慮し、モータ間に0.5[mm]の遊びを設けています。
縦幅
縦幅は110.0[mm]になりました。基板製造サービスに発注する際、100.0[mm]を超えると料金が跳ね上がってしまうので100[mm]に抑えたかったのですが、実際に部品を配置していると100.0[mm]では部品を搭載しきれなかったためやむなく10.0[mm]延長した110.0[mm]となりました。
厚み
厚みは1.6[mm]にします。この点に関しては、昨年の6月に参加したマイクロマウス合宿で上位常連の方からアドバイスを聞いて決定しました。走行時に壁に激突した際の機体の耐久性を考えてプリント基板の厚みの一般的な値である1.6[mm]で良いと聞きました。基板厚み1.6[mm]は発注の際の最安値にもなるのでお財布にも優しいです。
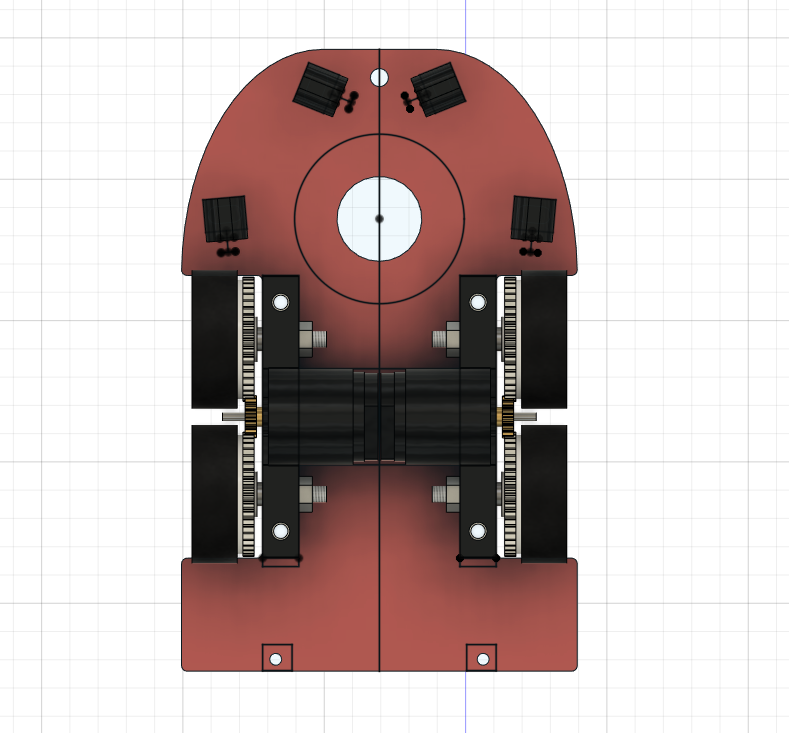
足周り(モータ+タイヤ)
4輪なので少し占有する領域が多いです。機体がコースに激突した際にモータのシャフトにダメージが行かないようにタイヤが車体の内側に収まるようにします。
距離センサマウンタの利用
距離センサはPi:Coと同じような構成です。以前にPi:Coを使っていた際、センサの角度が応力によって変わってしまう点(箱への収納の仕方や壁への激突時に曲がる)が不便だと感じていたので取り付け方を少し変更します。
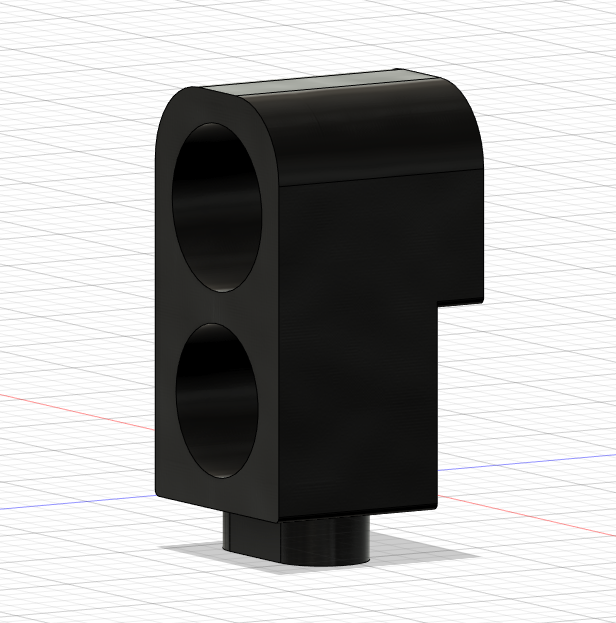
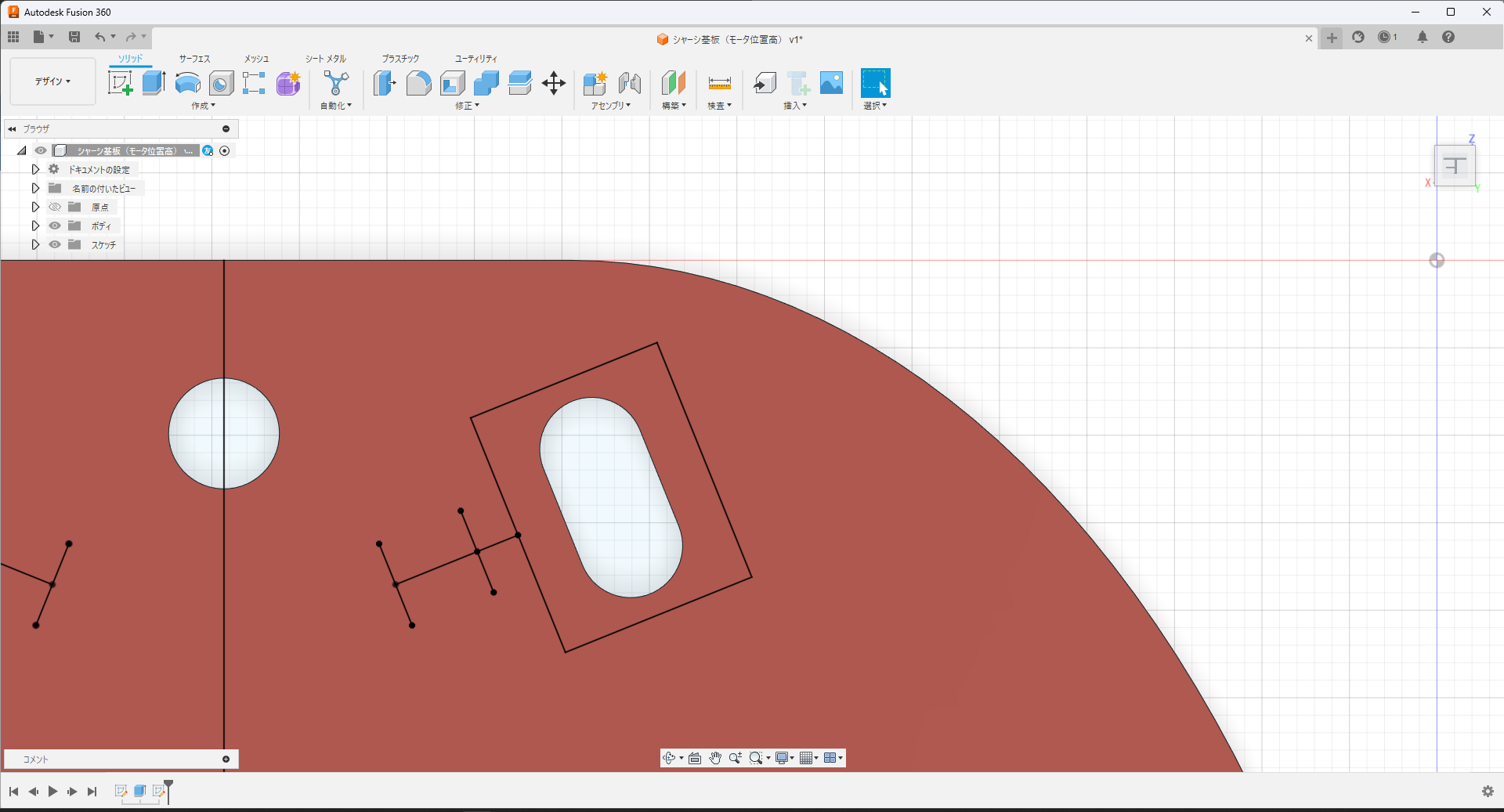
今回はセンサマウンタを設けて距離センサの位置決めを簡単にし、取り付け方によって角度が変わりづらくなるようにします。センサマウンタにはLEDとフォトトランジスタを固定する穴を設けます。センサマウンタの下部には車体(基板)との取り付け位置を決める治具となる突起を設け、車体に穴を明けて位置を固定します。
距離センサの配置
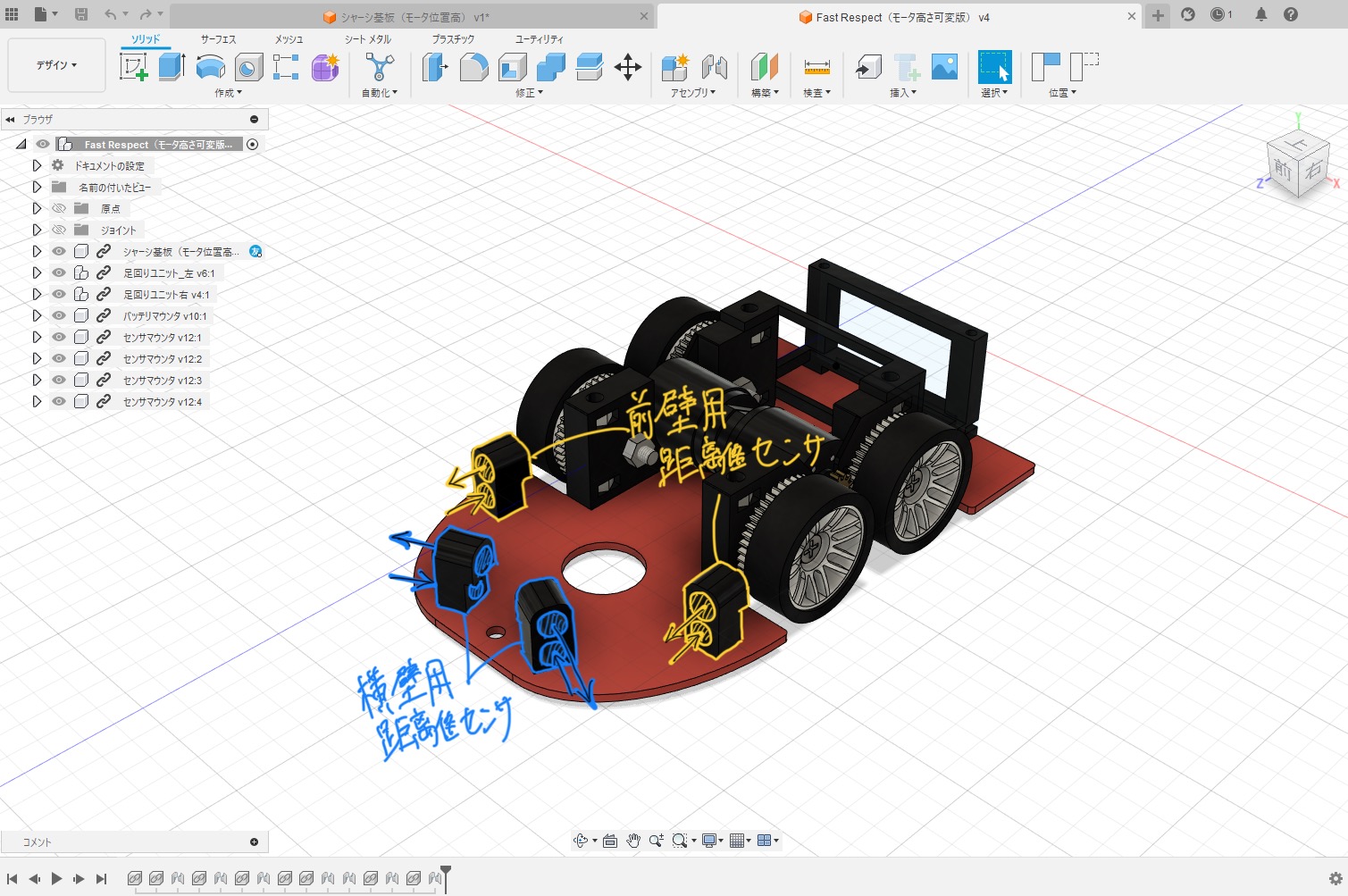
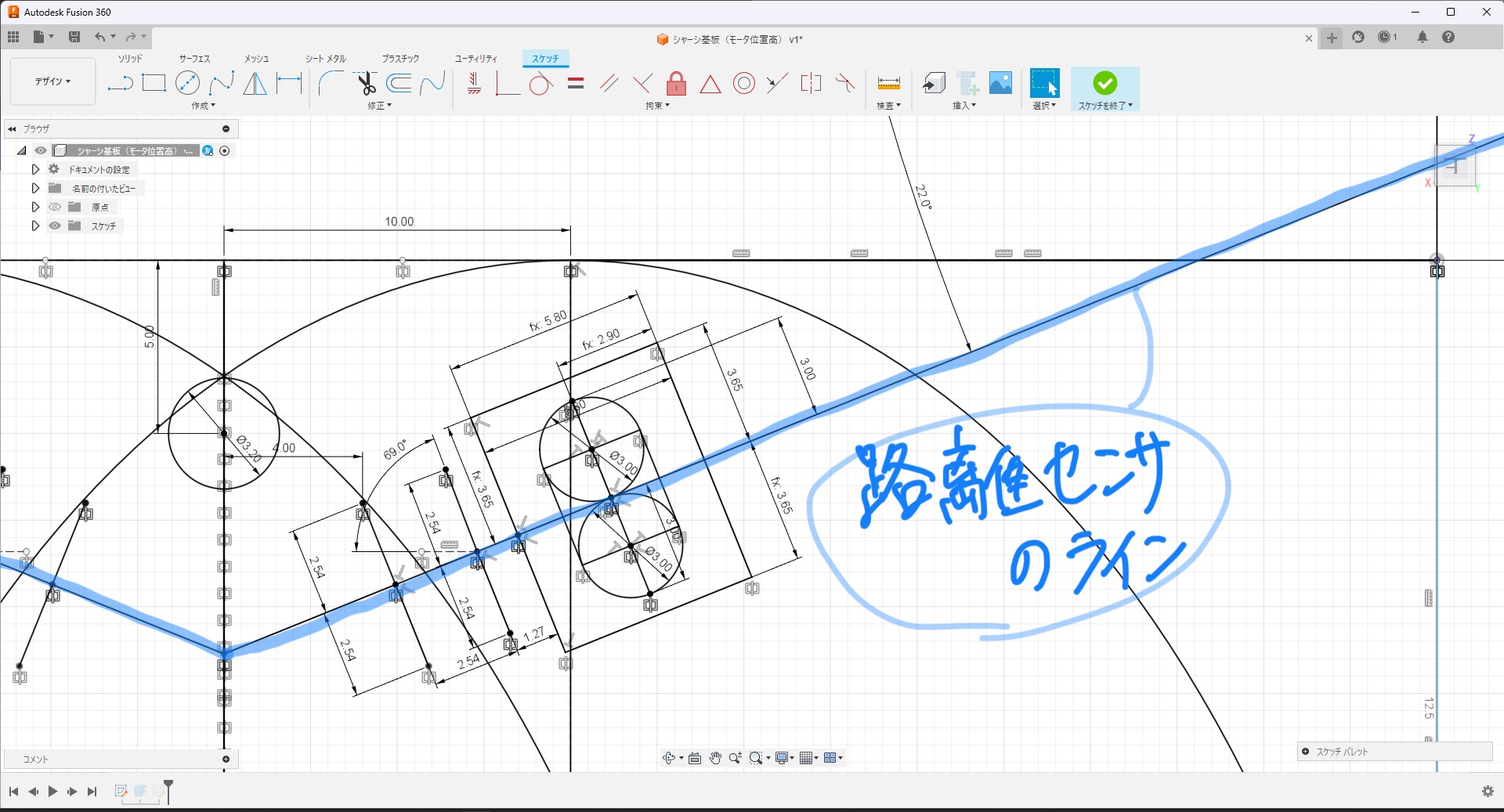
距離センサの配置を考えます。前壁と横壁を見る用に各2つずつの合計4つの距離センサを搭載します。
マウスは探索の際、180×180[mm]の各区画に侵入する度に左右+前方の壁の有無を判定したいため、機体が区画と区画のちょうど中間位置にいることを想定して配置を決定します。
機体の旋回中心(4輪のタイヤ重心位置)が区画の境界に乗った瞬間に左右の横壁用の距離センサが壁の中点位置を見るようにします。機体の旋回中心と区画の重心位置を一致させた際には、距離センサが区画の角を見ているとも言い変えられるので、Fusion360のスケッチ段階では距離センサの位置合わせとして区画も一緒に描いています。
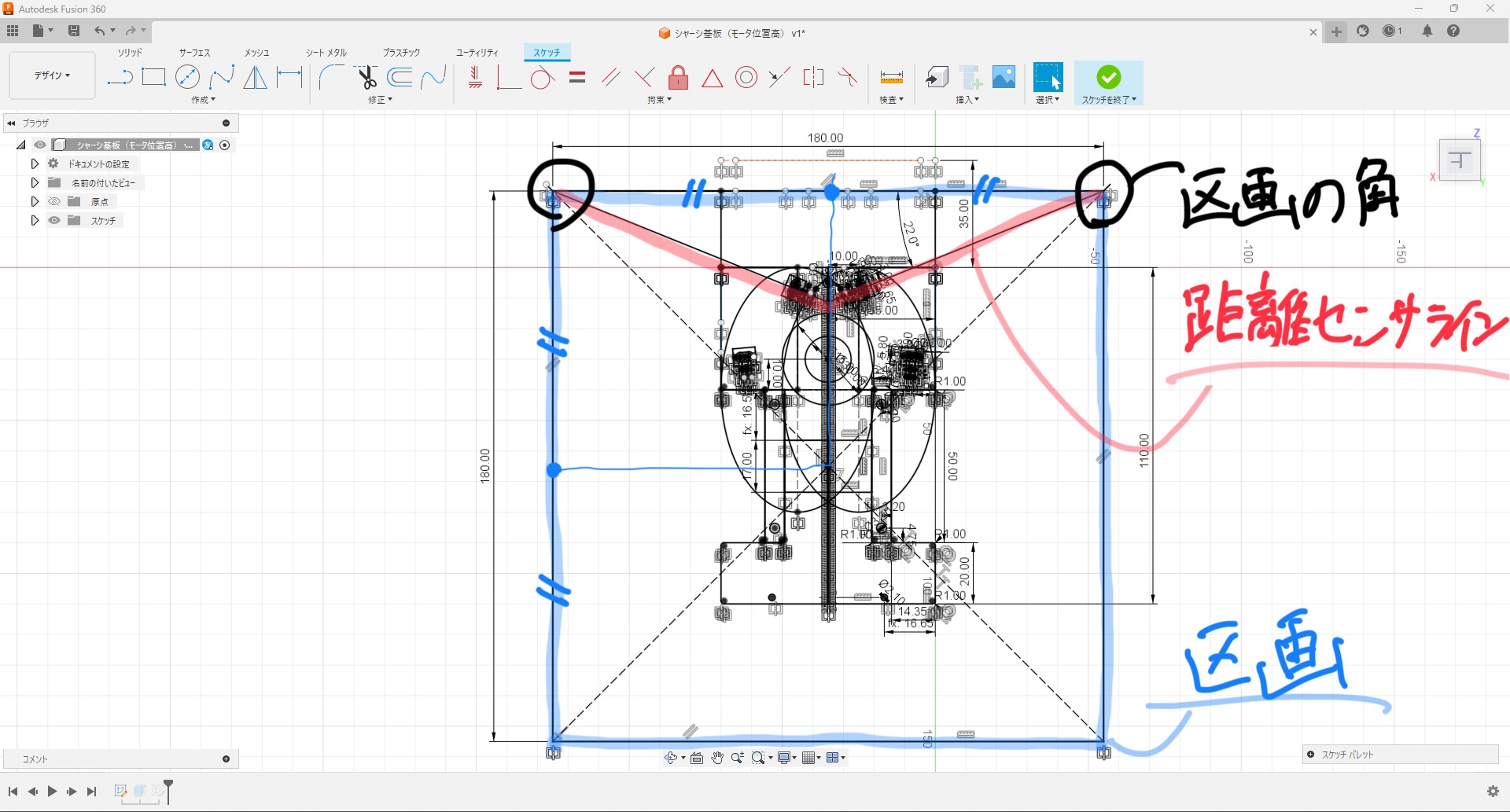
距離センサが見るべきラインを決めました。ライン上に横壁用の距離センサ2つを設置することを想定してセンサマウンタ固定用の穴を開けます。
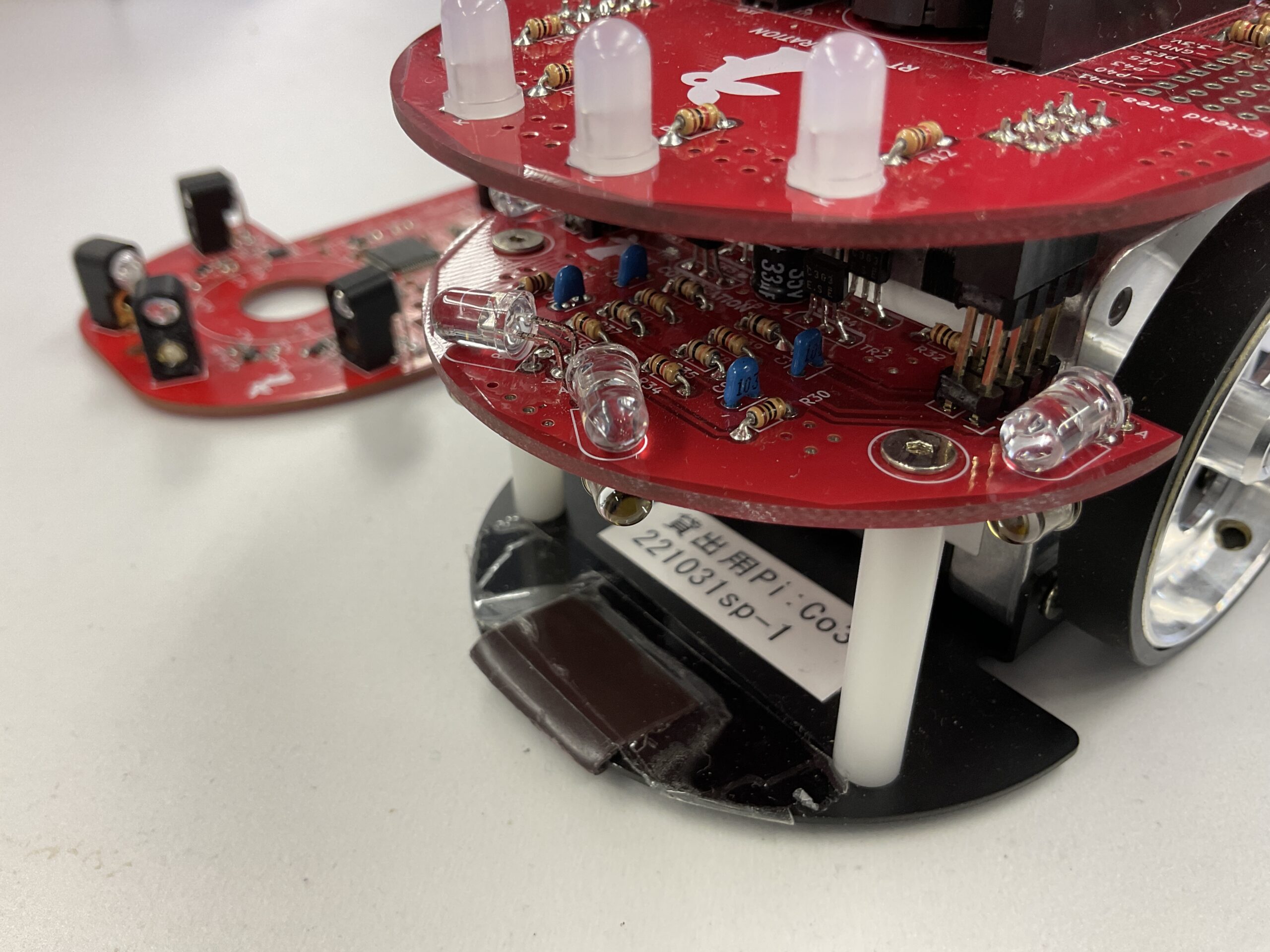
前壁センサについては、鏡面反射を避けて拡散反射を受光できるように5[deg]だけ傾けて左右に2つ配置します。こちらについては佐倉さんのブログで語られています。
鏡面反射に比べて扱いやすい拡散反射が受光側に帰ってくるように、センサを壁から傾けて配置するのが一般的です。また、前を向いているセンサは傾けた場合変な感じになってしまうのと、様々な使い道があるので、2個搭載しているマウスが多いです。
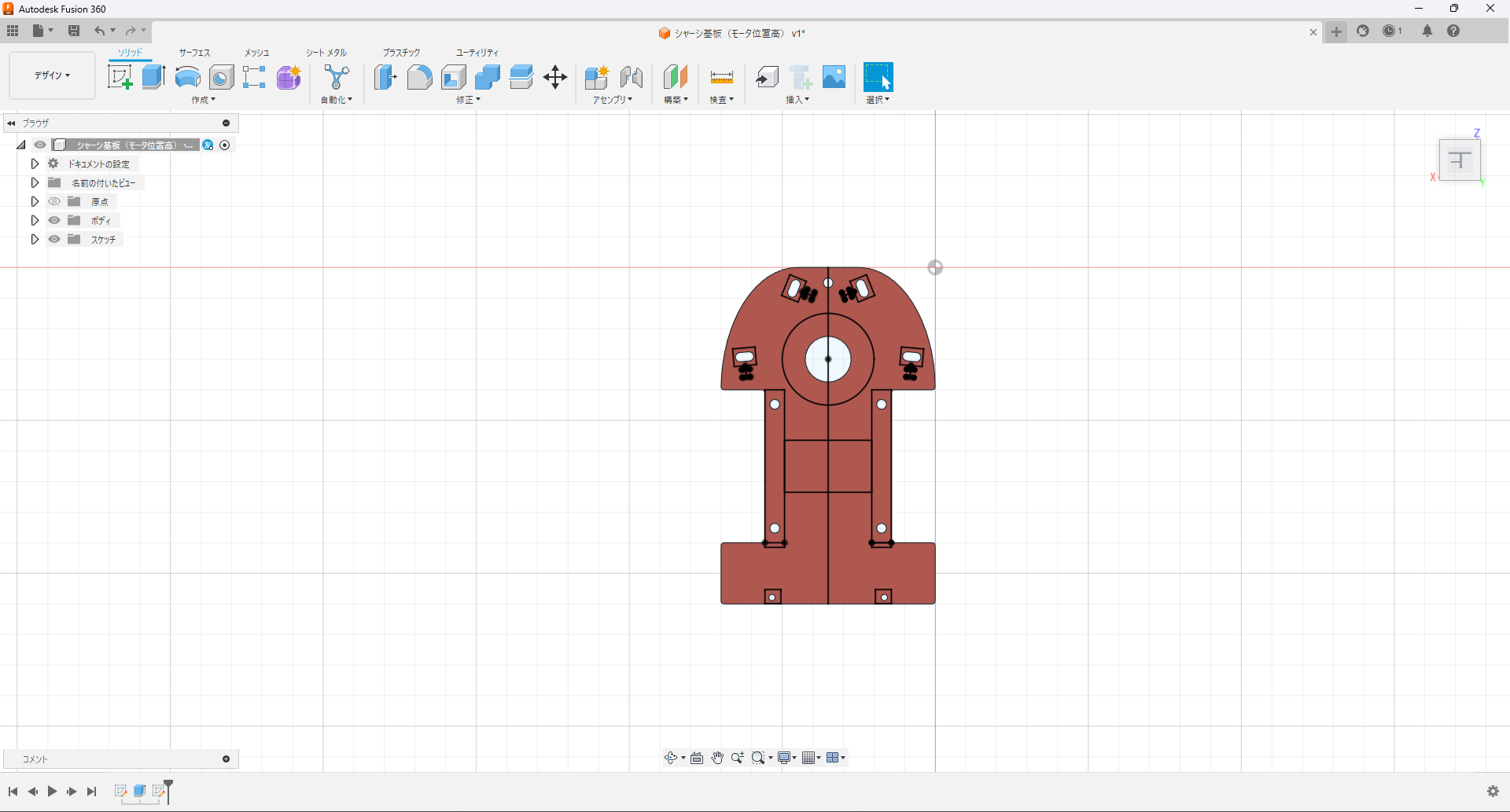
吸引機構スペースの確保
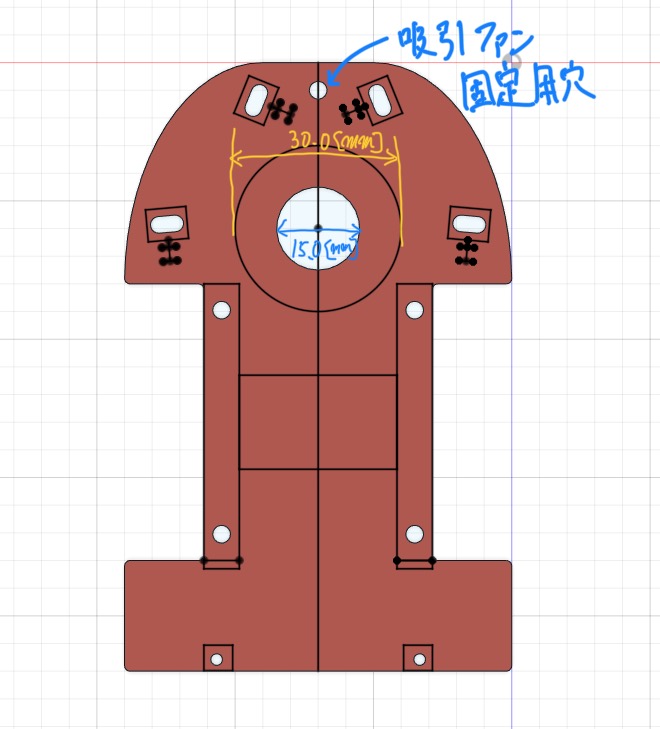
吸引スペースを考えます。すぐには搭載しないものの、搭載するためのスペースは確保しておかなければなりません。空気の流入穴の径を15.0[mm]、ファンの外径を30.0[mm]として、この領域上には部品を配置しないようにします。径の数値は上位陣の機体に多く採用されているものを参考にしました。
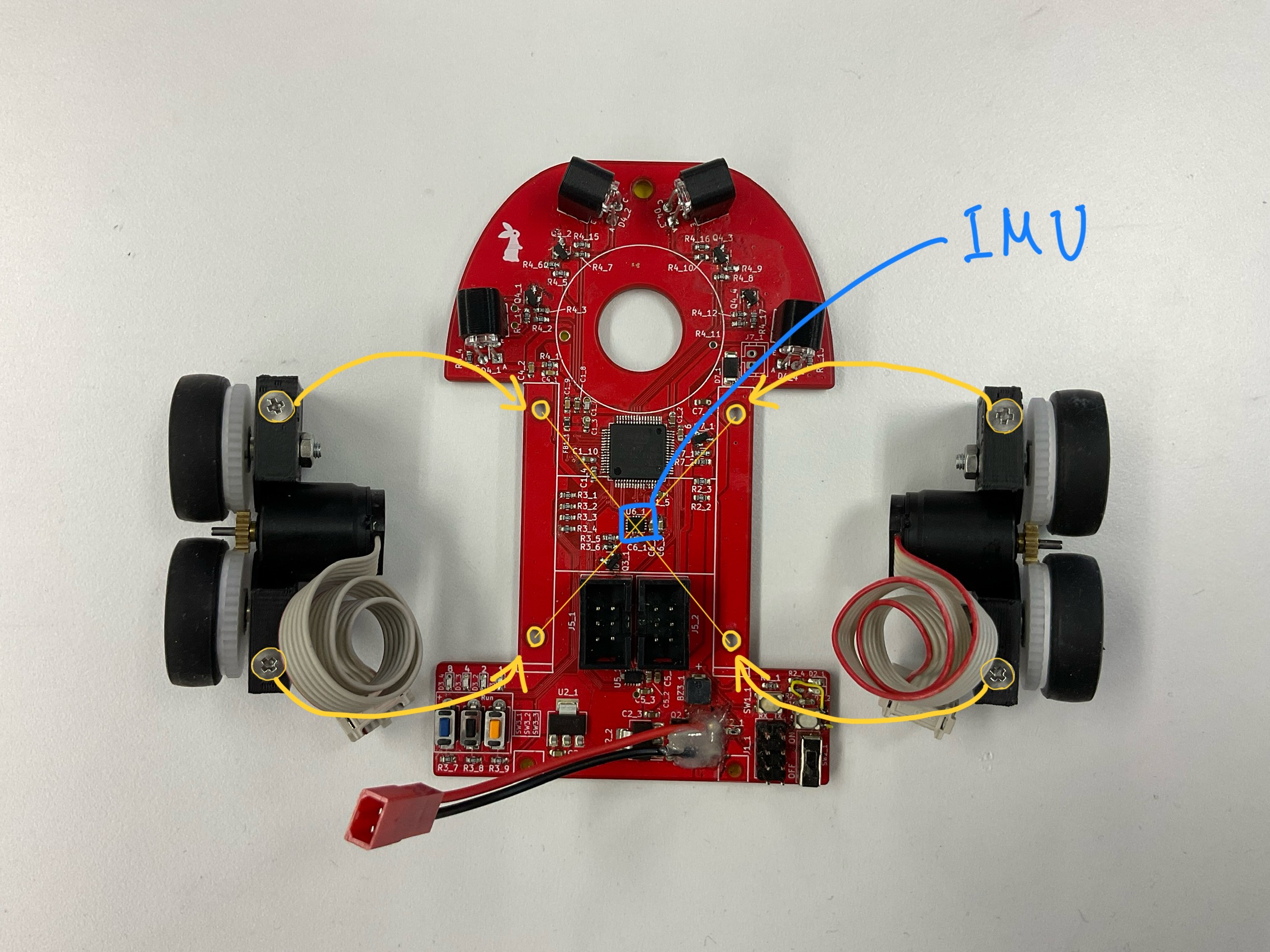
IMUの位置の決定(タイヤ重心の位置)
IMUはタイヤの重心位置(回転中心)に設置することが理想です。機体が角速度を持っている状態であっても回転中心であれば遠心力は発生せず、機体にかかる純粋な前後の加速度を扱えるためです。ですが、回転中心に設置せずとも遠心力の影響を防ぐ方法自体はあります。
こちらについてはまついさんのブログ「まついのまうす製作録」で分かりやすく解説されています。
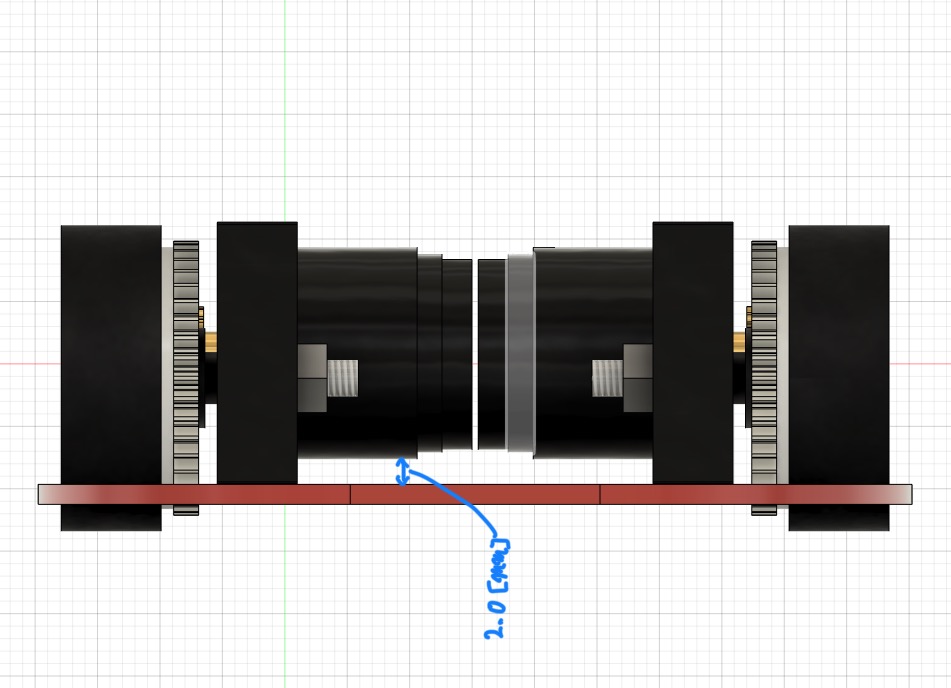
タイヤの重心位置はモータの設置位置とかぶるため、モータマウンタを少し修正してモータを基板から2.0[mm]程度浮かせています。これによって副次的に他の部品もモータに干渉しなくなるので設置スペースが増えます。
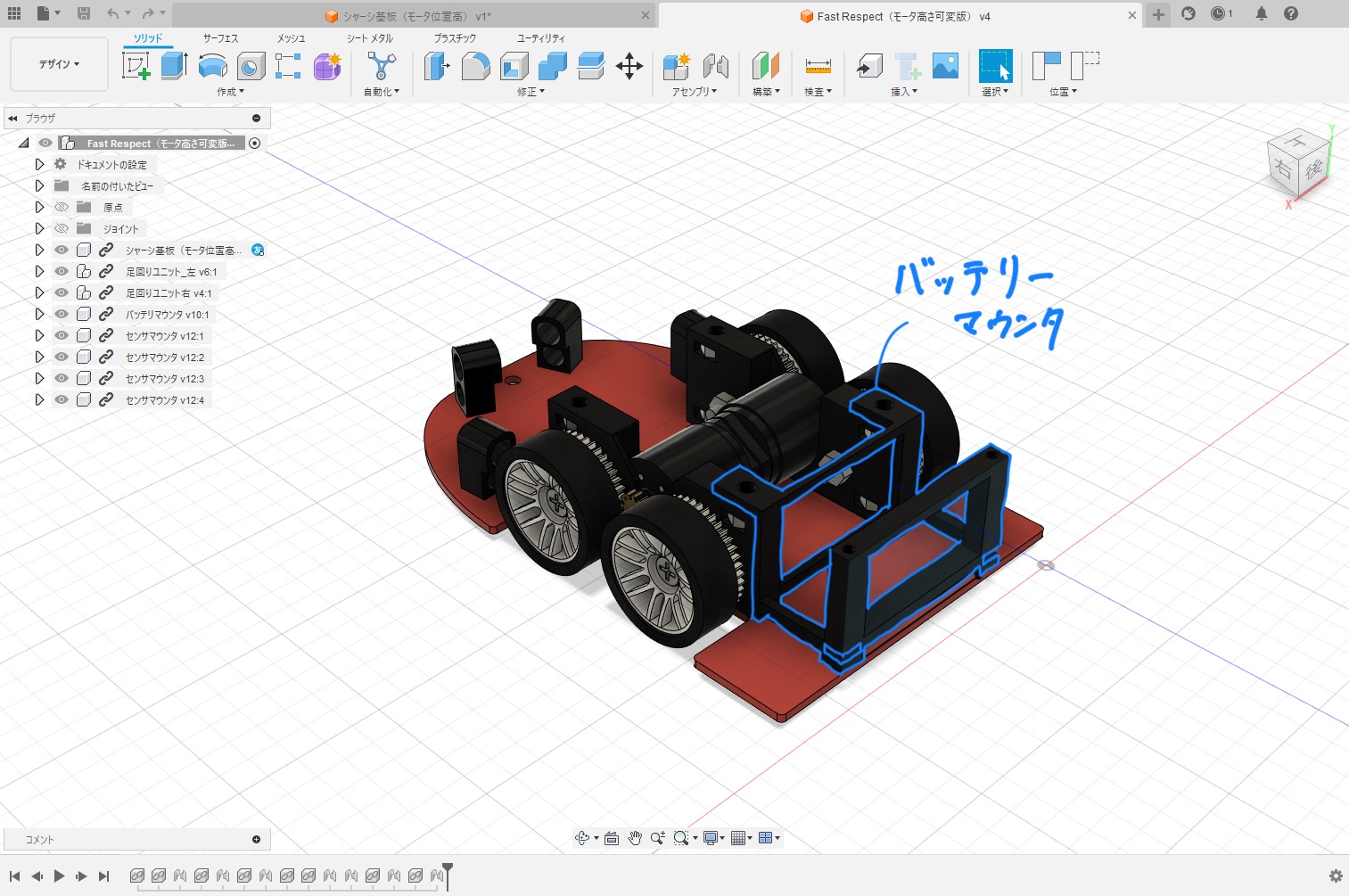
バッテリーマウンタ
バッテリーを搭載するマウンタを設計段階では製作していましたが、実際に製作してみると3Dプリンタの印刷強度や固定方法が不適切であったため、実際の機体組み立て時には見送りとしました。
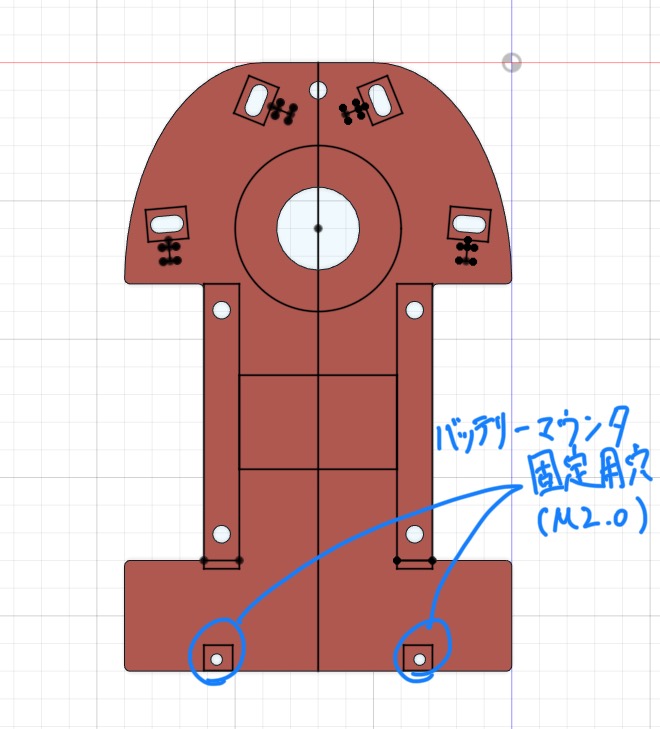
取り付けに使用できる固定穴は残しているので今後の追加機構とします。
まとめ
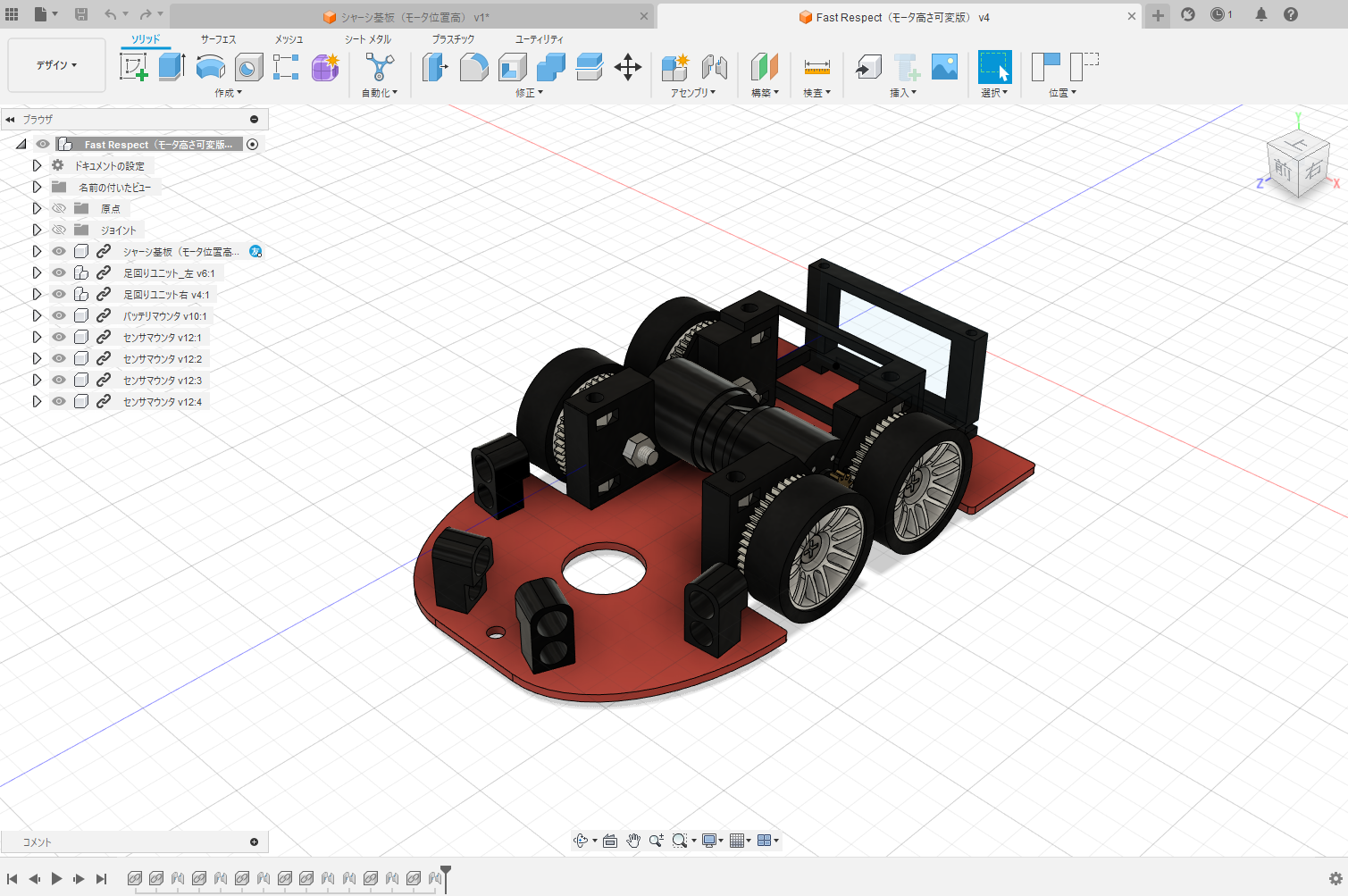
以上で機体の設計は完了です。最後にFusion360上で部品をジョイントして干渉が無いことも確認できました。
次回は基板を設計します。前回引いた回路図と今回決めた車体の外形を取り込んで実際の基板をKiCADで作ります。