

はじめまして、アールティ畠山です。2023年8月に中途で入社いたしました。前職はロボットとは全く関係なく茨城県のメーカで製品の機構設計をしておりました。本記事では弊社で取り扱いしている「カチャカ」やAPIについて連載していきます。初回はセットアップについてご紹介します。
「カチャカ」製品紹介

「カチャカ」は株式会社Preferred Roboticsさんが開発した、家庭用自律移動ロボットです。家庭用と名の通り、専用の家具「シェルフ」と連携することで呼びかけや専用アプリの指示により家具を運びます。説明だけだとピンと来ないかもしれませんので公式の紹介動画を下記に貼っておきます。

株式会社Preferred Roboticsさんの技術が集約されており、まさに次世代の家電と呼べる製品なんですが、家電としての機能だけではなくなんと公式のカチャカAPIを使えばプログラミングで自由に動かしたりROS 2との連携も簡単にできます。今回の記事ではROS 2で動かす準備段階としてカチャカAPIのセットアップまで書いていきます。
弊社では、販売のほか、カチャカAPIを使ったプログラミングに関する有料サポートや、カチャカを使ったアプリケーションを開発したい企業に向けた受託開発も承ります。問い合わせはこちら
セットアップ方法
2023年9月現在の方法をご紹介します。最新の詳細な説明に関しては公式を参照してください。なお、セットアップにはスマートフォンアプリも必要です
動作環境
- Ubuntu 22.04 LTS
- Python 3.10
- ROS 2 Humble
- Docker
事前準備
- ?カチャカAPIの有効化
-
- スマートフォンアプリの設定タブ からロボットを選択
「カチャカAPI 」→ 「カチャカAPIを有効化する」をONしてください。
- スマートフォンアプリの設定タブ からロボットを選択
-
- ?カチャカのIPアドレスの確認
- スマートフォンアプリの設定から「アプリ情報」を選択
「IPアドレス」にカチャカのIPアドレスが記載されています。 - IPアドレスが確認できたらブラウザで以下のURLに入ってください。
- http://<カチャカのIPアドレス>:26501/
- JupyterLabのログインページが表示されたら成功です。
- JupyterLab使用してPythonのサンプルコードを実行できます、今回は割愛します。詳しい内容は公式を確認してください。
- スマートフォンアプリの設定から「アプリ情報」を選択
ROS 2 セットアップ
公式の説明通りにセットアップします。
サンプルコードのインストール
cd ~ git clone https://github.com/pf-robotics/kachaka-api.git
kachaka_interfaces, kachaka_descriptionのビルド
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
ln -s ~/kachaka-api/ros2/kachaka_interfaces/ kachaka_interfaces
ln -s ~/kachaka-api/ros2/kachaka_description/ kachaka_description
cd ~/ros2_ws
colcon build動作確認
- 以下を実行してros2_bridgeを起動してください。
cd ~/kachaka-api/tools/ros2_bridge ./start_bridge.sh <カチャカのIPアドレス>
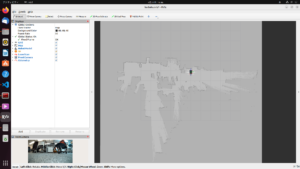
- RViz2による可視化
- 別のターミナルで以下を実行してRViz2で画面が表示されたらセットアップは完了です。
- カチャカ内部でNavigationが実装されているため、RViz2の画面で「2D Nav Goal」ボタンで目標位置を設定するだけで、目的地点に移動します。
cd ~/ros2_ws source install/setup.bash cd src/kachaka_description/config rviz2 -d kachaka.rviz
次回は公式のROS 2サンプルコードを参考にカチャカを動かした事例とRSJ2023の展示デモについて書いていきたいと思います。

移動ロボットを扱った経験が少なく素人目となりますが、「カチャカ」は作りこまれた製品だと感じました。公式のドキュメントも充実しており、PCあればすぐに動かせますし、ROS 2の経験が少ない私でも簡単に動かせました。移動ロボットを用いたアプリケーションを作りたいけどハードウェア選定に悩んでいた方におすすめだと思います。