
こんにちは!はしもとです。
前回は、以下の内容についてまとめました。
- 発光回路設計
- 受光回路設計
今回は、モータ周りとIMUの回路設計をすすめていきます。
モータ周りの回路設計
モータ単体の回路
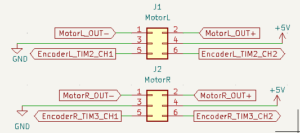
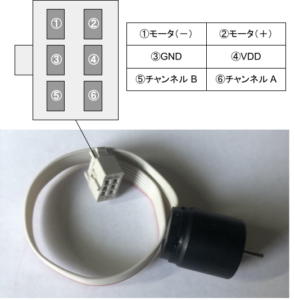
今回使用したのはFAULHABER 1717T003SR-3Vです。
以前のブログでまとめた、モータに取り付けられたコネクタのピン配置をもとに設計しました。
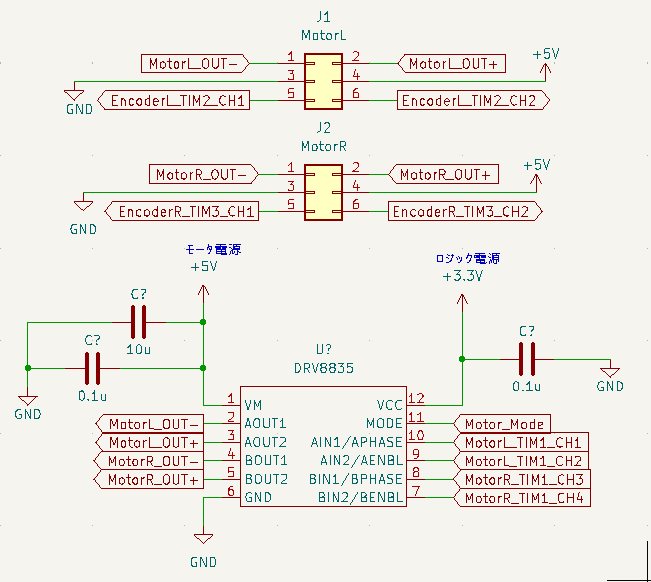
モータドライバの回路
使用したモータドライバはDRV8835です。選定理由としては、以下の通りです。
- 1つのモータドライバで2つのモータを制御でき、小さい面積で基板にのせられる
- ?マイクロマウス競技でよく使用されている
モータドライバの仕様については以前のブログにまとめています。
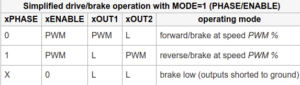
製造元の販売ページ(https://www.pololu.com/product/2135/)より抜粋
回路内のDRV8835に書かれたAPHASEやBPHASEでモータの回転方向を指定し、AENBLやBENBLで出力の強さを指定します。
AOUT1やBOUT1のピンで実際にモータに出力します。
その他のピンについてですが、まずMODEというピンはモータドライバのモード設定を指定します。詳細は以前のブログでまとめています。
またVMはモータの電源(7.5V)、VCCはロジック電源(3.3V)です。
電源それぞれにはコンデンサ0.1μFを一つずつ取り付けています。こちらはDRV8835のデータシートP12の「Typical Application」を参考にしています。
さらに、モータ電源のほうには追加で10μFのコンデンサも付けています。
これらのモータ電源、ロジック電源に付けられたコンデンサはバイパスコンデンサ(通称:パスコン)と呼ばれ、ノイズを除去する働きがあります。除去できるノイズはコンデンサの容量によって異なります。
また、モータ電源はロジック電源に比べモータに直接供給する電源であり、ノイズがのりやすく様々な異なる周波数成分を持つノイズが発生してしまいます。バイパスコンデンサは、異なる容量のコンデンサを並列に並べることでノイズに強くできます。したがって、モータ電源側では0.1μFと10μFの2つのコンデンサを取り付けています。詳しい説明はこちらの記事がわかりやすかったです。
IMUの回路設計
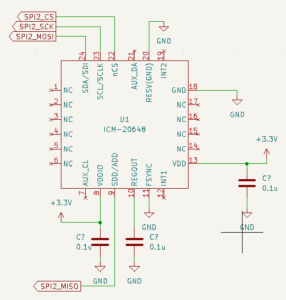
使用したIMUは、ICM-20648です。選定理由は、以下の通りです。
- ?マイクロマウス競技でよく使用されている
- 先輩社員からのおすすめ
1年くらい前に購入したときは在庫がまだあったのですが、今は全然ないですね。。。
自作マイクロマウス研修を始めた1年くらい前に、こういったIC部品は今後入手しづらくなるので早めに確保しておいたほうが良いというアドバイスを先輩からお聞きしていたので自分は運がよかったです。これからマウスを始められる方は在庫がある部品は次いつなくなるかわからないので、気になったら早めに入手しておくことをお勧めします👍
実際に設計した回路はこちらです。
データシートに書かれている回路テンプレートを参考にしました。
IMUとマイコンはSPI通信を行います。SPI通信はI2C通信と比べて、通信速度が速いので短時間で多量のデータを転送でき、リアルタイムに機体の姿勢を取得することができます。
SPI通信の詳細は以前自分が書いたブログにまとめてあるので、よろしければご参照ください。
まとめ
今回は、モータ周りの回路とIMUの回路設計を行いました。
前回はハイパスフィルタ、ローパスフィルタのようにノイズを除去するフィルタの説明をしましたが、今回もノイズ除去のためにパスコンを紹介しました。ノイズ対策にも色々あるんだなと学びが得られてよかったです。
それでは、また!