
前回の投稿から驚くほど時間が経過してしまいました。
大会シーズンも近づいてきたので慌てて開発を進めていかないとまずそうです。
今回はマイコンの選定? の話を書いていこうと思います。
マイコンの選定
通常であれば使い慣れているSTMicro社のSTM32マイコンを使うところですが、最近は半導体不足が著しくなかなか欲しいマイコンが手に入りません。趣味用であれば在庫を見つけた瞬間にさくっと確保したりするのですが、研修ということで多少は在庫が残っている期間の長いSAMマイコンを使ってみては?というお達しが出ました。
SAMマイコンというと元はAtmel社の製品でしたが、現在はAtmel社がMicrochip社に買収されてMicrochip社の製品となっています。それに伴い、開発環境もMicrochipの統合開発環境MPLAB X IDEが使えるようになっているようです。これを使えばSTM32と同様にピン割り振りやクロック設定などが楽にできるようです。(MCC Melody, ClasicはSAMマイコン未対応のためMPLAB Harmony Configuratorを使う必要があります。)
SAMマイコンのラインナップは以下のようになっています。
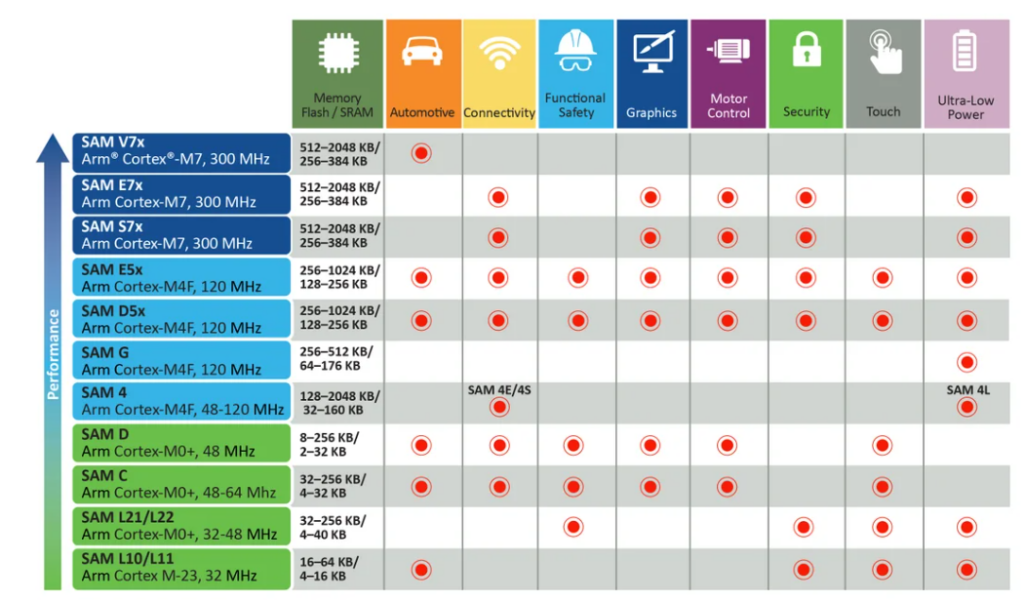
今回はブラシレスモータを回さないといけないのでFPUのついたマイコンを選定したいところです。SAM S7, SAM E7は計算能力は高いですが、CANやEthernetに割かれているピンも多く、在庫のあるマイコンだとマイクロマウスに使うには少しインターフェースが足りなそうでした。
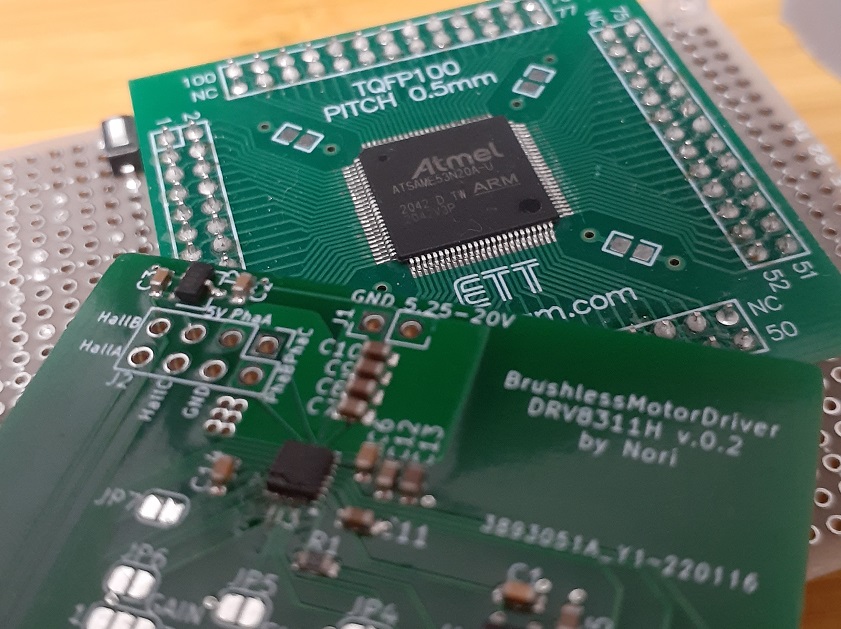
そこでSAM E5x, D5xあたりの在庫のあるマイコンを確認し、ATSAME53N20Aを選定し購入しました。(ブログ投稿時には在庫なくなってましたが・・)100ピンのマイコンなのでインターフェースは十分足りそうです。クロック速度が120MHzなため計算が間に合うか少し不安な部分もありますが、とりあえずこのマイコンを使って試していくことにします。今回ブラシレスモータは位置センサーありのベクトル制御で回せるようにしたいなと思っているところですが、それでも計算が間に合わない場合マイコンの増設や再選定したいなと思います。そのためには再利用性が高いコードを書かないとですね。
モータドライバの選定
こちらも半導体不足の影響で選定が難しくなっています。ちょうど探していたときに在庫のあったDRV8311という製品を購入してみました。
1パッケージにMOSFETを使用した3つのハーフブリッジドライバや電流センスアンプなどが内蔵されたチップで、3本または6本のPWM信号で駆動できるため、これとマイコンがあればブラシレスモータをお手軽にかつ自由に回すことができそうです。
3 ? 20V、ピーク電流5Aのため、前回選定したモータの定格電圧6V、最大加速時の電流0.440 Aであれば十分使えそうです。
出力PWMも最大200kHzのため、モータの電気的時定数約112μ秒に対して十分大きいPWM周期で出力することもできそうです。実際にそこまで速くできるかはマイコン側との兼ね合いもありそうですが。
こちらもとりあえず試しに使ってみてダメだったら再検討という方針でいこうと思います。
サムネイルのブレークアウトボードはこちらのチップのテスト用に作ったものをいただきましたー
位置センサの選定
マイコンの選定で位置センサありのベクトル制御を目指すと書いたので、位置センサも決めていく必要があります。
こちらはマイクロマウスでよく用いられており、ブラシレスモータの駆動に使われることも多い、磁気式のエンコーダを使用したいなと思います。
この方式ではモータやホイールの回転軸に径方向着磁 磁石を取り付けその磁束変化をセンサで読み取ります。
ブラシレスモータへの取り付けイメージはこんな感じです。
マイクロマウスでの使われ方は過去の先輩方のブログでも何度も紹介されています。
ブログでも紹介されているMPS社の磁気エンコーダは私も以前使ったことがあるので、この中から適当なものを使用したいなと思います。