
こんにちは、hayashiです。
今回は、部品選定を踏まえて、機体の構成と要求性能を確認していきます。
機体の構成
大まかに必要そうなものを書き出します。
処理系:CPU、書き込み用基板(ブート切り替えスイッチ、LED)
駆動系:モータ、ギア、タイヤ、モータドライバ
センサ系:IMU、エンコーダ、壁認識センサ(発光、受光素子)
電源:バッテリー
インターフェース:ブザー、モード選択スイッチ、モード表示LED、電源スイッチ、電源LED
吸引:モータ、ファン
色々と必要な部品がありますが、現状決まっている部品は以下の通りです。
駆動用モータ:ファウルハーバー製モータ(FAULHABER 1717T006SR-6V)
DCモータを搭載したクラシックサイズのマウスに多く採用されているものを使用します。
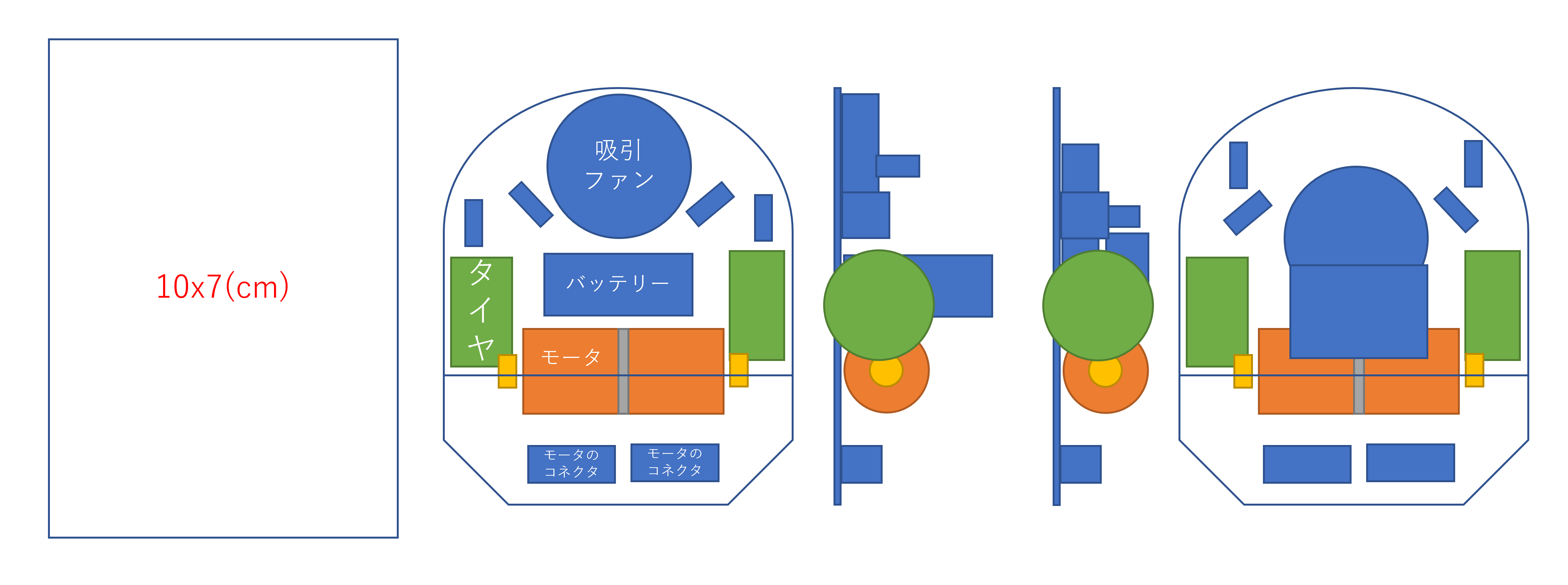
大体のサイズ感から、機体の各部品を大まかに配置すると以下のようになります。このイメージで進めていきます。
要求性能の確認
どのくらいの速さで走ってもらうか決めて、残りの部品の選定基準にします。
基準の性能に関してはこちらのブログにある通り、duty比を決定して確認します。
式に代入する各種パラメータとして、加速度と最高速度の決定が曖昧だったので、少し整理しました。
加速度の話
マイクロマウスで一番加速が必要な状況は、スタート一歩目でターンをする走行と教えていただきました。(そんな迷路走りたくない)
スタートの初速は0[m/s]で距離に関しても、迷路の中心に置く場合、加速区間は9cm程度になります。(加速を出すために縁からスタートする機体もあります)
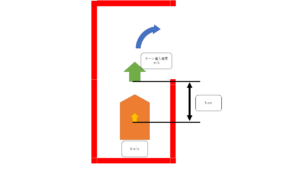
この状況から、ターン進入速度まで、加速する必要があります。
ターン進入速度はターン自体の速度にかかわってきます。色々なターンを作ると、その分の管理や調整が複雑になり、完走できない要因が増えるので、ターン進入速度は一定のものを定義します。
これにより、決定したターン進入速度まで加速する必要があります。
今回は、過去の大会の記録を参考にターン進入速度を決めます。上位陣は2m/sぐらいなので、とりあえず半分の1m/sとします。
直線運動の公式から加速度は大体5.5[m/s^2]になります。
最高速度の話
加速度が決まったのであとは、どのくらい加速区間を設けるかで最高速度を決めます。
過去の大会機体の性能から等加速度運動した場合の加速区間を調べると3~5区画(1区画18cm)で最高速度になることがわかりました。
なので、今回は加速区間を4区画として、先ほどの加速度から最高速度を計算すると、2.8[m/s]ぐらいになります。
duty比の計算
加速度と速度の確認ができたので、その他パラメータを決定します。
以下参考にしたリンクです。
各種パラメータを色々試して、最終的には、duty=0.7程度になりました。
性能基準の0.8、以下になったので、これを目安に部品選定、機体設計を行っていきます。
まとめ
・機体構成と要求性能の確認を行いました。
・要求性能から部品選定の目安を確認しました。