
はじめに
初めまして、2021年4月から株式会社アールティに新卒で入社しました はしもと と申します。これからマイクロマウス研修で学んだことをブログに書いていこうと思うので、今後ともよろしくお願い致します。
マイクロマウスなんですが、自分は今までやったことがなく、就職活動しているときにアールティのブログを読んで初めてマイクロマウスの存在を知りました。大学ではロボット系の研究室に所属していて、人間と同じくらい大きな移動マニピュレータやお掃除ロボットを扱ったことはありましたが、こんなに小さなものは扱ったことはなかったです。しかしながら、こんなに小さなロボットでもロボットの基礎から発展まで学べることはかなりあり、驚きました。
そんなマイクロマウス初心者の自分ですが、今回から弊社の新人研修で行ったP:iCo Classic3の制作~迷路完走までの記録をブログに書いていこうと思います。解説記事というよりかは、4日間の新人研修でマイクロマウスを体験してみた感想に近い記事を書いていきます。
それではまずPi:Coのハードウェア制作を行っていきます。
ハードウェア制作
はんだ付け

メイン基板とはんだ付けをする部品の数々
最初に行うのは、Pi:Coの部品を基板に取り付けるはんだ付けを行います。
自分は、手先が不器用ではんだ付けをするのにかなり時間をかけてしまいました。また今回の研修では時間も限られていたため途中から焦ってしまい以下のような失敗をしてしまいました。
- はんだ付けする部品の向きを間違える
これは、今回2回やってしまいました😢
一つは抵抗の向きをマニュアルに記載されている抵抗の向きと反対にしてしまいました。ただ一般的な抵抗器は極性がありません。なので、基板へどちらの向きで実装しても回路の動作には関係ありません。ただ後々はんだ付けされた基板を見るときに、抵抗の向きがそろっていないと見にくいというデメリットはあります。このとき、自分はそのような事情を知らずに向きを間違えたと思いはんだ付けをやり直してしまいました。
もう一つは、極性がある部品を正しい向きとは反対に取り付けてしまったので、それもはんだ付けをやり直しました。
. - 壁センサ用フォトトランジスタとLEDの位置が上下逆
以下の画像のように自分のセンサ基板では、基板の下にLED、上にフォトトランジスタを取り付けたのですが、正しくは基板の下にフォトトランジスタ、上にLEDでした。基板の上にフォトトランジスタ(受光する側)があったほうが、上にスペースがある分、天井にある照明などLEDから発せられる光以外の光を受け付けやすくなってしまいますが、動作にそこまで大きな影響はないということだったので、今回はそのまま作業を続行しました。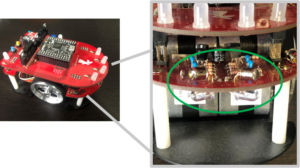
今回作成したセンサ基板
上がフォトトランジスタ(受光側)、下がLED(発光側)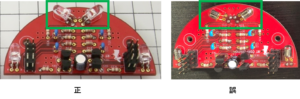
正しくは、上がLED、下がフォトトランジスタ
.
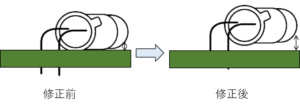
- 壁センサ用フォトトランジスタの取り付け方がおかしい
これは、完成してPi:Coのセンサ角度を調整しているときにに発覚しました。センサ基板裏にある壁センサ用フォトトランジスタと基板との距離が近すぎるため、干渉を起こしていてうまくセンサ角度を調整できませんでした。これは、はんだ付けした箇所を温めながら、手でフォトトランジスタを少し上に引き抜くことで修正しました。

組み立て
上記で作成した基板にタイヤや支柱を取り付けたらPi:Co Classic3のハードウェア完成です。

まとめ
今回の記事では、Pi:Co Classic3のハードウェア制作について書きました。はんだ付けは中学生のときの授業でやったのと、大学でほんの少しやったくらいでスムーズにできるか心配でしたが、案の定苦戦しました。ただ、しばらくしていくうちにはんだ付けも慣れていき、綺麗にできたときはすごく爽快な気分になり、面白かったです。
今回は以上です。次回はハードウェアが完成したので、実際に走らせていこうと思います。