
はじめに
?マイクロマウス研修のはじまり?
みなさんこんにちは! YUUKIです。
2021年4月、入社後、弊社のマイクロマウス研修が始まりました。 前年度までは医療業界に従事しており、ロボットとは無縁。学生時代は魚類養殖ということで養殖魚の新規開発・販売戦略構築等を研究していたり、非常に多趣味で(釣りとかプラモとか車とか…)その一つとしてArduinoでM5Stackを動かして前職場で溶存酸素や温度や湿度を測ったりしていましたが、やはりロボットとは無縁でした。
そんな私ですが、ご縁あって今までやってきていたこととは180度違う世界に身を投じて不安ではありますが、切磋琢磨していきたいと思います。
弊社では、社員全員がマイクロマウス研修を行います。ロボット開発を行う上で、ハード、ソフト両方の知識を持つ、もしくは理解しておく必要がありそれを学ぶ教材としてマイクロマウスは最適といえます。(詳しくはこちらをご覧ください)
ゆくゆくは一からマウスを自作し、マイクロマウス競技に出場することが目標となっているようですが、いきなり設計から…なんて難しいというか無理です。
ということで弊社が販売しております「Pi:Co Classic3」を使い、マイクロマウスって何ぞや?
ってところから始め、自作マウスで大会出場、完走を目指していきたいと思いますので、暖かく見守っていただければと思います。
Pi:Co Classic3
早速組み立てます!
早速キットを開封して組み立てていきます。
抵抗からLED、トランジスタに至るまで多くの部品をはんだ付けしていきますが、数年前に車に後付けする追加メーターのLEDと抵抗を打ち換えた程度で久々の作業で多少の不安はありました。
ですが、このキットにはこんな自分にも優しい練習用として小さな基板が入っており、改めてはんだ付けの確認ができるものでした。

3種類の点灯パターンではんだ付けできているか確認をしてからPi:Coの組み立てになります。
マニュアル通りに組み立てていくのですが…
順調に組んでいたかと思いきや電源スイッチの取り付け向きを逆にするという…
抵抗の向きを間違えるくらいのかわいいミスとは程遠く、初めて使う半田吸い取り器に苦戦しつつ何とか取り外し正しい向きに付け替えれました(笑)
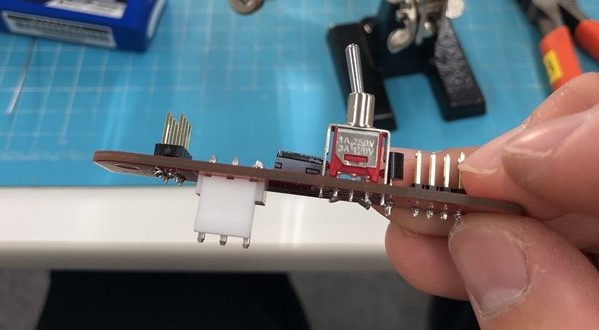
(基板接続用のピンよりスイッチが大きいので違和感があるはずですが迷いなく取り付けていました…)
と紆余曲折ありましたが無事にPi:Co完成です。

やはり組みあがるとここで一つ達成感が生まれます!
環境構築
無事Pi:Coが組みあがったので、プログラムを書き込んでいくためのPCの環境を整えていきます。
こちら詳しくは、別のマウスであるHMキットの紹介ブログのほうで書いています。
HMキットもPi:CoもRX631マイコンを使用しているので基本的に同じ環境で開発できます。
気になった方はそちらをご覧ください。このPi:Coでも使用するバッテリーの注意事項についても記載しています!
次回は…
環境構築も済んだので次回記事で迷路完走にむけた紆余曲折を書いていこうかと思います。
ここまでは、趣味でやってた経験があるのでスムーズにいっていますが、ここからマウスの調整やスラローム走行に向けたプログラムの書き換えなど、初めてなことだらけなので頭抱える壁が増えてきます(笑)
それではっ…
YUUKI