

初めまして、2020年4月から株式会社アールティに入社しました しゅう と申します。今後ともどうぞよろしくお願いいたします。こちらに次回の記事を投稿しております。
実は入社前から、アルバイトとしてアールティにはお世話になっており、バイト内容の関係でその頃からマイクロマウスであり学習キットでもあるPi:Co Classic 3に携わっておりました。そのため、本ブログの最初の2, 3回分の投稿は活動記録を思い出しながら描いていきます。まずは簡単に自己紹介をしておきます。
自己紹介
僕はアメリカで生まれ育ち、ロボットや物づくりは小さい頃から好きです。
中学の頃にFirst Lego Leagueと呼ばれている大会に出場したり高校の頃は音楽関係でエフェクタやヘッドフォンアンプなども作りました。
学部及び院の研究室ではRobot Operating System (ROS) を用いたロボットを使用していました。この時期に扱っていたロボットは警備ロボットなど人間と同じくらいの大きさでした。
なので、Pi:Co Classic 3のようなコンパクトで可愛らしいロボットを扱うのはかなり久しぶりでワクワクしております。
それではまずはハードウェア周りの製作から始まります。
製作
半田付け
今回は、研修ということで弊社が出している学習キットであるPi:Co Classic 3というものを用います。
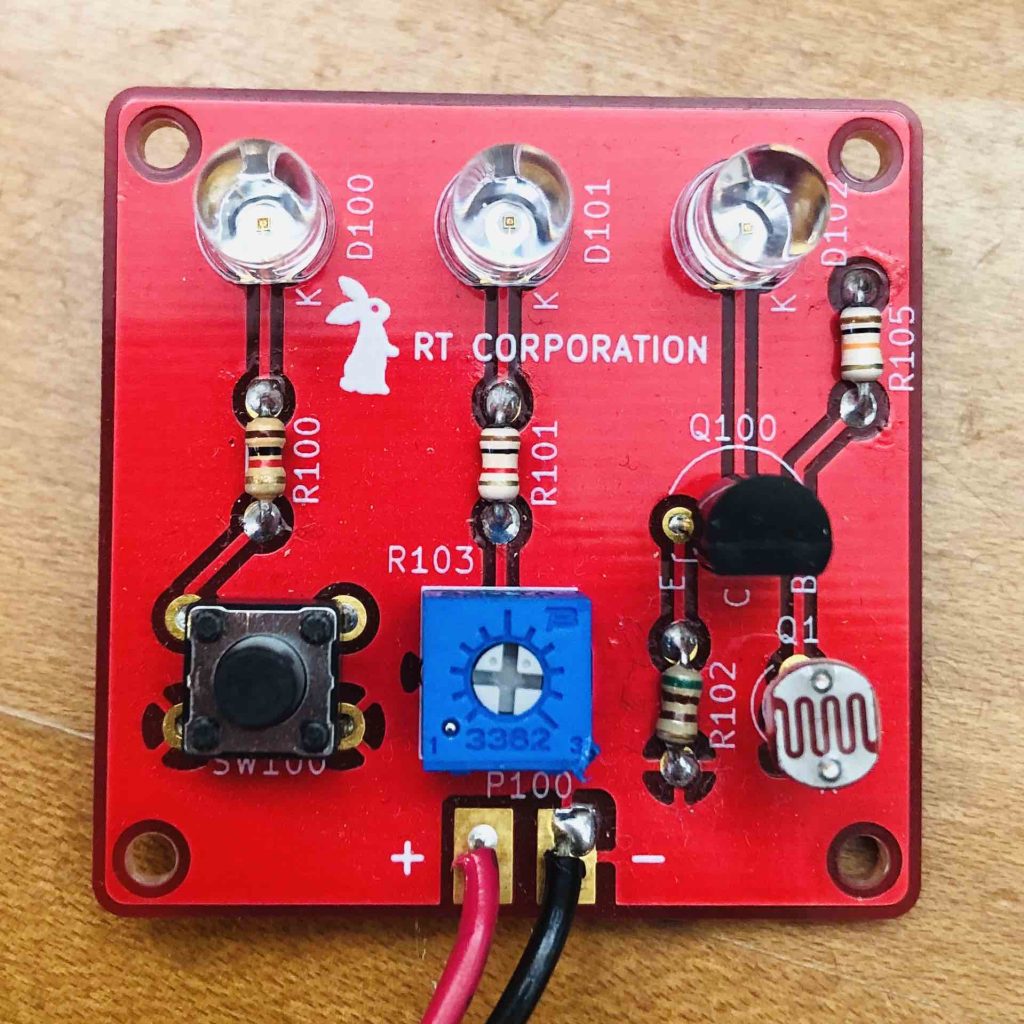
このキットは半田付けから行うことができます。ただし、初めての半田付けだったり久しぶりに行うと失敗する可能性があり、最悪部品などを買いなおさないといけません。そこで、本体を半田付けする前にこの練習基板で半田付けのウォーミングアップができるのはかなりありがたいですね。
次に、本体の半田付けに入ります。

Pi:Co Classic 3は、使用する電子部品などが小さい袋に小分けされており、それぞれ番号が割り振られています。それらの番号は、マニュアルの各ステップで参照されており、とても簡単に順番を追うことができます。
さらに、マニュアルには部品を実装する時の図が多く載っており、基板上でも各部品の向きなどが分かりやすく印字されています。そのため、久しぶりの半田付けであっても、特に困ることなく半田付け作業が完了しました。
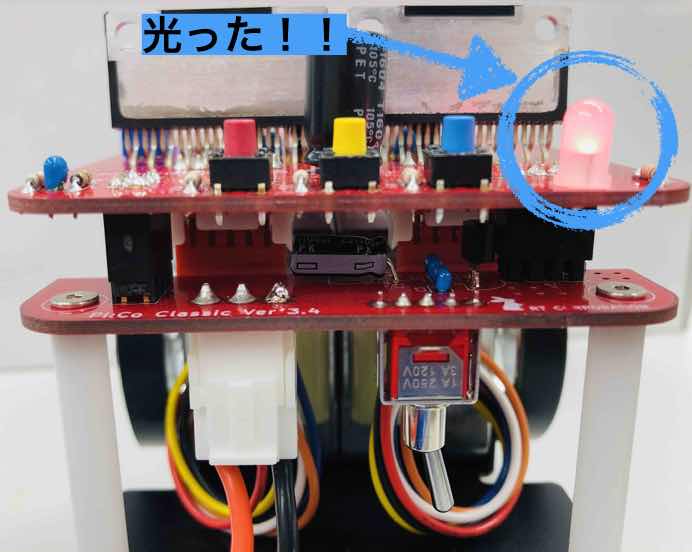
それでも、途中経過の確認として基板にバッテリーを繋いで電源を入れるときは、正常の動作するかドキドキしましたね・・・
組立
四つの基板、メイン基板、センサ基板、電源基板そしてCPUボードを無事製作したので、それらと残りの部品を組み合わせて車体を完成させます。
完成したものがこちらです。
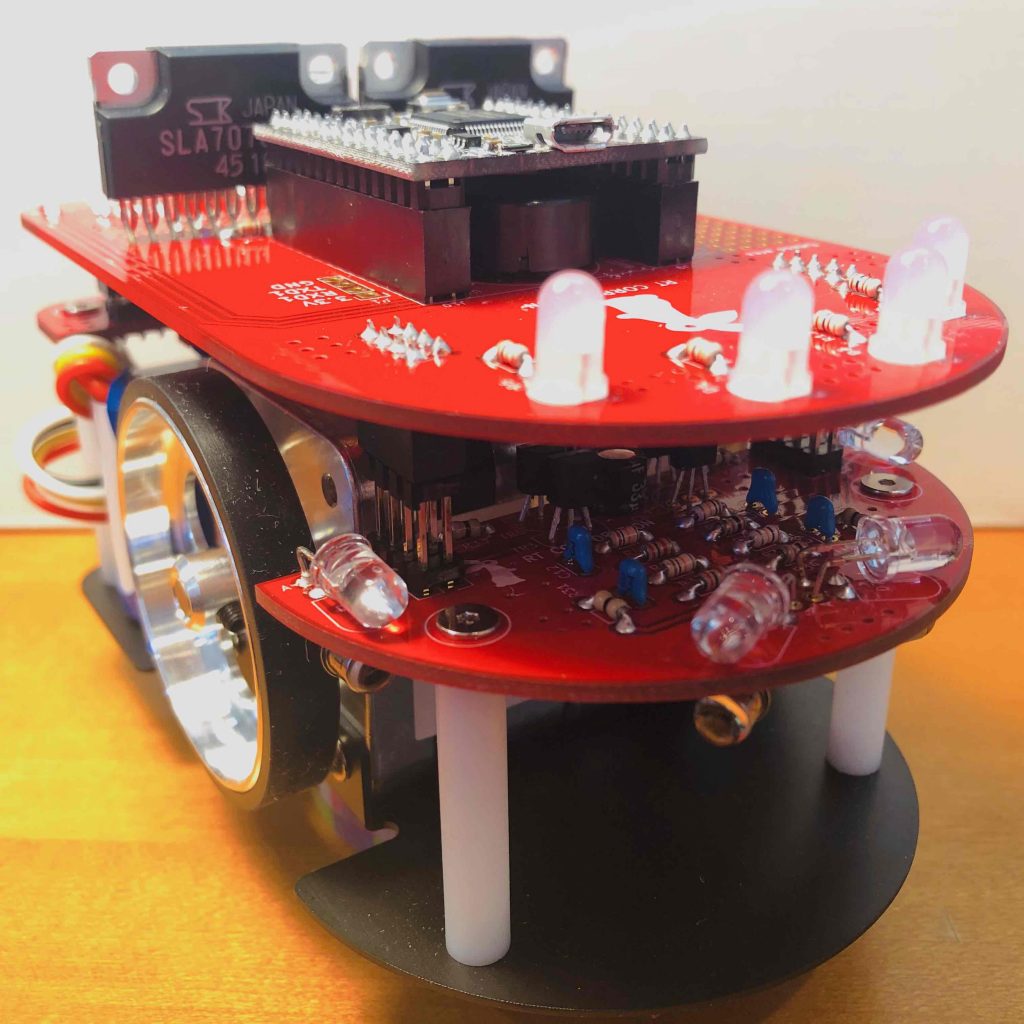
ものとして完成すると結構な満足感が得られますね♪
早く動かしていきたいので次回からは、このPi:Coにプログラムを書き込んで動かしていきます。