

16×16のコースをゴール出来る様になってきたので
その状態を維持したまま、櫛やジグザグに対応しようと思います。
現在の16×16のコースは基本単発の曲がり方が殆どで櫛もないので
小さいコースで調整します。
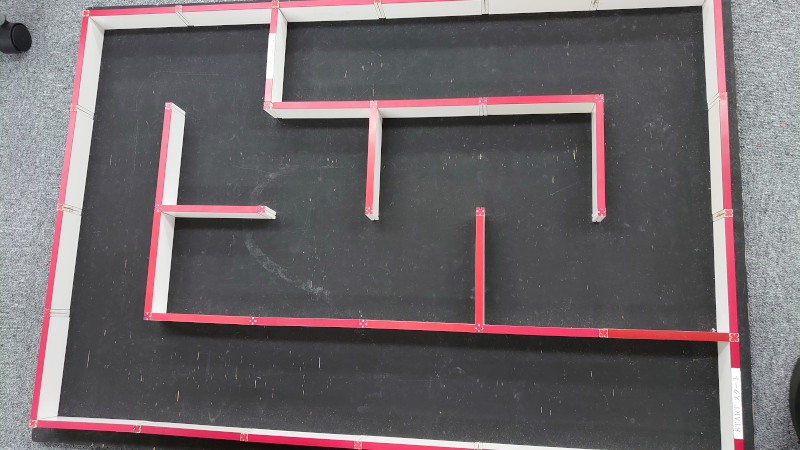
16×16のコースを走る基本部分をなるべく弄らない様にしつつ
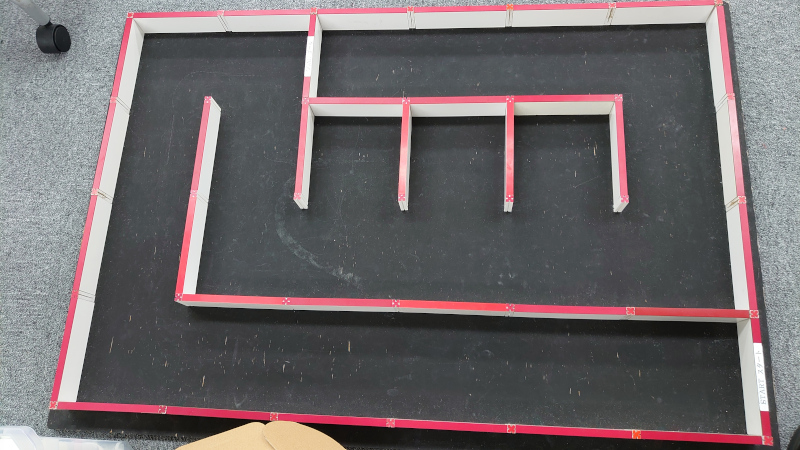
櫛とジグザグを走る部分を追加で加えていきます。
前回書きましたが、現状だと少し多めの移動量で走ります。
ストレートがあれば多少補正出来ますが
ジグザグが連続で続くと簡単にずれてしまいます。
そこで、ジグザグが続く場合、移動量を減らす条件式を加える事によって
行き過ぎない様にしました。
櫛連続も当然ずれるので、移動量調整しました。
こちらは一定回数櫛が続くと壁当てして位置を修正する様になってましたが
これが何故か悪さをして、壁当ての後、妙に移動距離が少なくなるので
具体的な原因を特定出来ない間、一旦壁当ての後の移動量を増やす事で対処しました。
しばらくは16×16のコースで試走が出来なくなりそうなので
細かい調整や音関係を弄るかもしれません。