
こんにちは、hayashiです。
今回は研修の振り返りとして、初期に立てたコンセプトや各要素の反省を話して行きます。
基本構成の振り返り
今回の研修で作成した自作マウスの基本構成は初期段階では、2輪+吸引としていました。
これは動作的にシンプルな対向2輪のハード構成で、挑戦的な部分として吸引を考えていましたが、
結果として大会で完走した時の構成は2輪のみ、吸引なしになってしまいました。

吸引が搭載出来なかったこととして、大会後のブログにも記載しましたが、大きくはソフトウェアで走行系のデバッグ作業に時間を取られました。シンプルな2輪構成にしたのに走行系の制御周りに時間を取られてしまい、吸引を搭載する予定で基板等作成していましたが、ファンの設計や吸引に対応した走行軌道生成等に着手することが出来ませんでした。
ハードウェアの振り返り
安定したハードウェア
市販品とアルミフレームを活用したことで剛性が高まって、フレームや軸が歪んだりすることはこの研修を通して1回もありませんでした。ハードウェアは基本になるのでその点に置いては安心して開発することができてよかったです。最終的には競技中にフレームが飛びましたが。
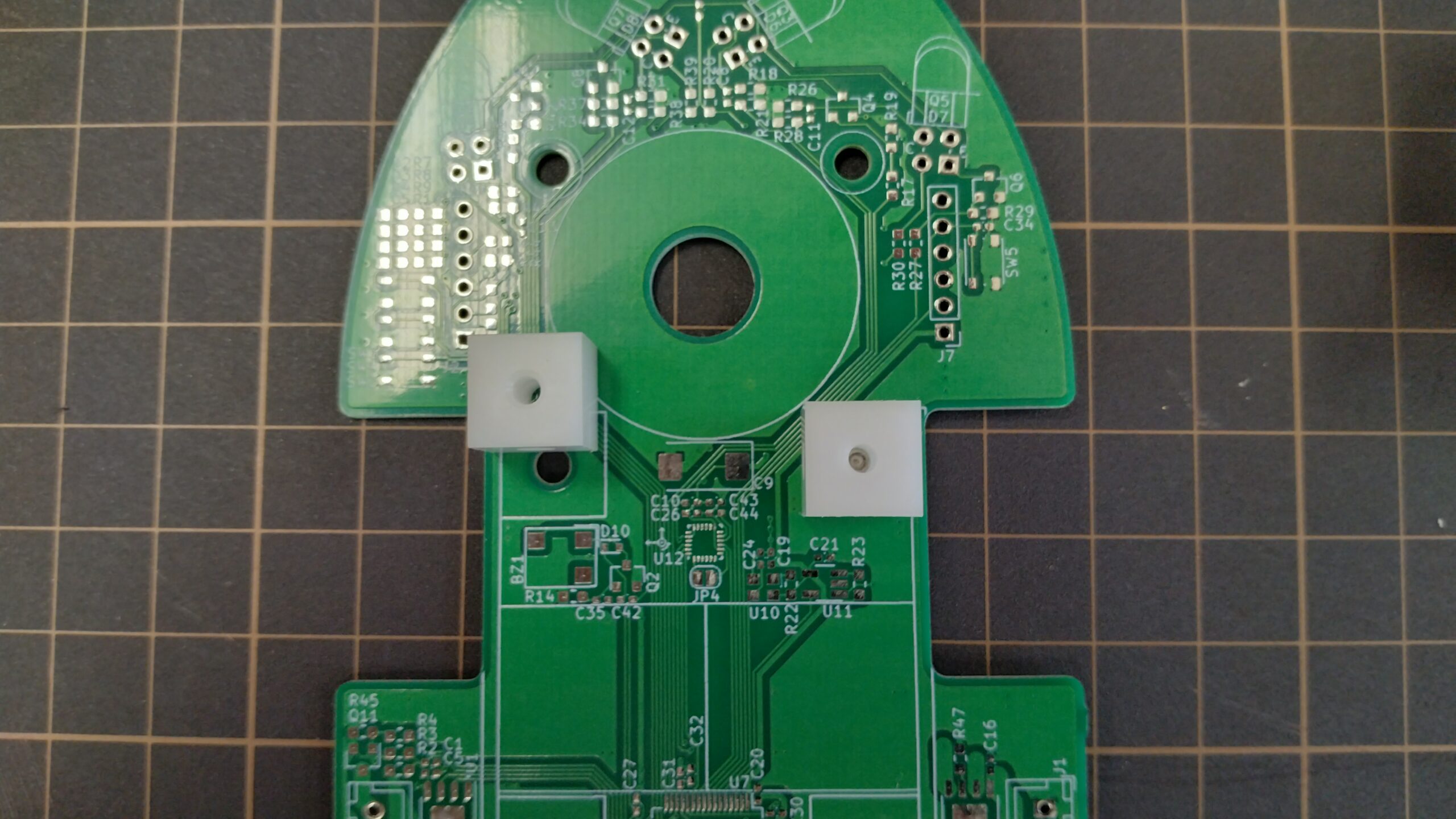
組立ての位置合わせ
組立ての位置出しは基板のシルクがあれば大丈夫だと思っていましたが、そんなことはありませんでした。もっとメカ的に組付けの位置出しができた方が圧倒的に運用が楽になります。
回路の振り返り
サイズとしてクラシックサイズを選んで、基板設計に余裕をもたせたのは良かったと思っています。競技として切り詰めればいらない回路もありましたが、研修としては色んなICに触れられたのは良かったです。
書き込み経路を2系統出していたことで救われたこともありました。実装スペースに余裕があれば代替機能を採用するのもありだと思います。
また、基板実装を自分で行う場合は、スペースがあればICの足は出ているものを採用した方が良いと思います。
シリアル変換ICとTVSダイオードのはんだ付けが出来ず、この書き込み基板はこの世で1枚しかありません。

ソフトウェアの振り返り
マイクロマウスのシステムを作る上で、Pi:Co Classic3等のサンプルプログラムを参考に作成しました。必要な機能、最終的な形、挙動が開発を始める段階である程度見えていて、都度、目標を確認しながら開発を進められたのは良かっと思います。
デバッグに時間がかかったことを考えると入出力を意識して開発できていれば、より早く問題に気づけたと思います。最終的なものが見えていただけに、要素的な部分の仕様や作り込みが足りなかったと感じています。
必要な要素として、デバイスドライバから最短走行までと幅広く一通りの開発は出来たと思います。
走行を踏まえて
当初設定していた各種パラメータと現在の走行実績を比較します。(左が初期、右が実績)
ターン速度 1m/s → 0.7m/s
直進加速度 5.5m/s → 4.0m/s
直進速度 2.8m/s → 2.5m/s
開発の足がかりとしては良い設定だったと思います。
実績のパラメータは全日本試走会の迷路(16×8)では完走出来ていましたが、フルサイズ迷路では完走出来ませんでした。直進、スラローム単体では走行出来ているのでおそらくは、当初想定していたパラメータで動くことは可能ですが、完走するとなると話は違ってくると思います。
機構の差だけではないですが、直進のブレは大きいと感じています。2輪は4輪に比べると直進安定性が低いとされていて、吸引機構を導入することでタイヤと路面の接地圧が大きくなり、直進の走行性能が向上するらしいです。
スラロームの横滑り
問題を単純化していますが、スラローム時に発生する中心方向の加速度が9.8[m/s^2]以下であれば、つり合い上、横に滑ることはありません。
逆算すると旋回半径0.08[m]の場合、速度は[0.854m/s]となります。この速度以上で走行する場合は、なにかしらの横滑り対策をする必要があります。
問題を単純化しているため、実際にはタイヤの状態(摩擦)、重心の高さ等も影響してくるので、現時点のターン速度0.7[m/s]周辺が横滑りに対して対策をしない場合の限界と思っています。
仮に吸引等をせずに、ターン速度1[m/s]でターンすることを考えると、横滑りしないためには、0.102[m]以上の旋回半径の軌道が必要になります。
最終的な結果、全体の総括
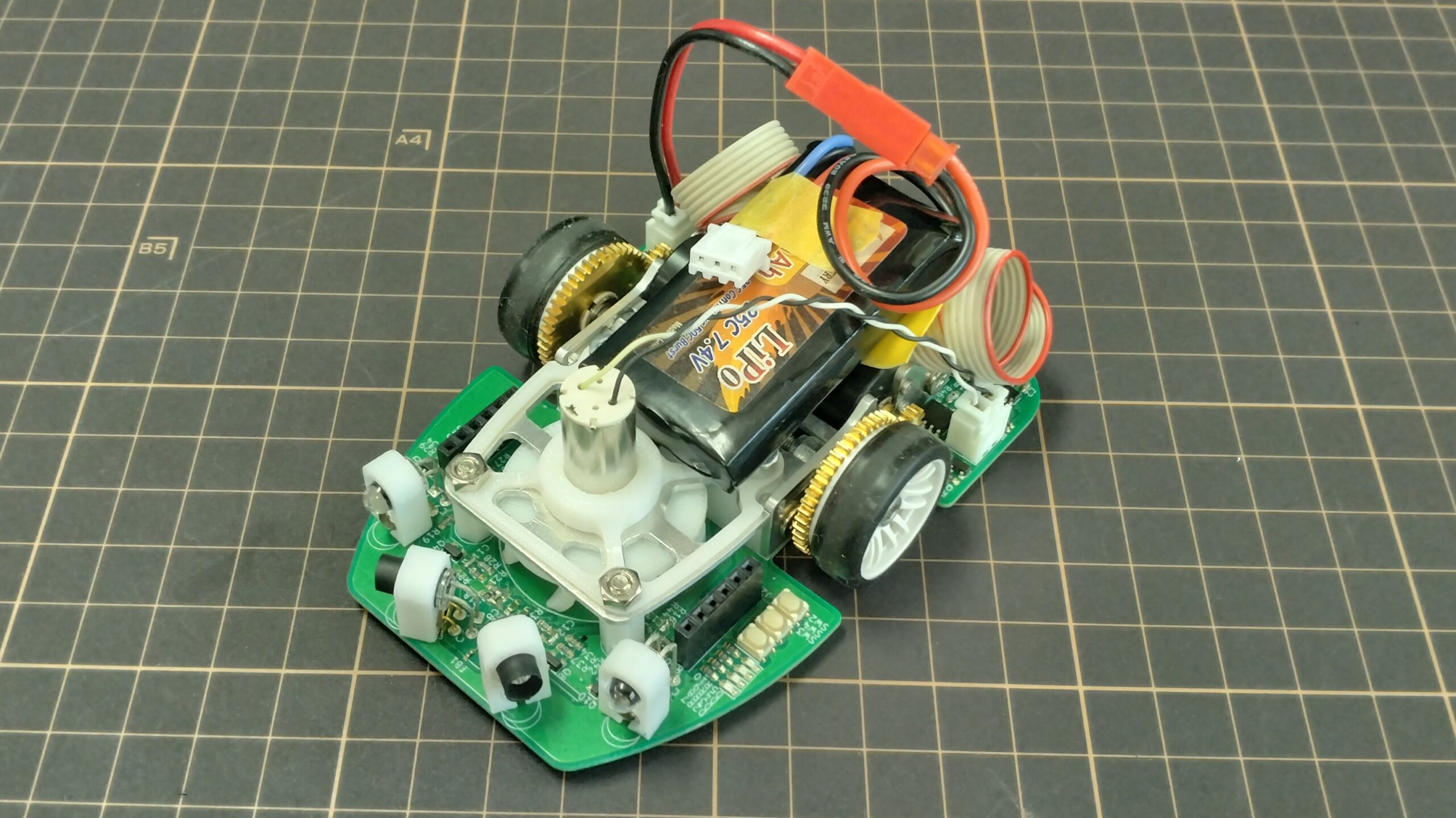
研修の目標である、DCモータ版自作基板マウスで完走することを達成することができました。
大会では最短走行で完走することもできて、競技としても楽しむことができました。
当初の想定は吸引を載せる前提で考えていた部分もあるので、大会で出来なかったことに悔しさを感じます。ですが、自作マウスの製作する流れを知る部分は確認できたと思います。それぞれに難しい部分や注意しないといけない部分、マイクロマウス特有の問題、ロボット全般的な問題等を断片的に経験することができました。
今後の業務に活かせることしかない研修でした。
自作マイクロマウス研修はこれにて終了になります。ありがとうございました。