
こんにちは、hayashiです。
今回は大会参加したブログになります。
参加したのは「第43回全日本マイクロマウス大会」になります。
コロナの規制緩和傾向から、時間指定等なしで会場に参加者が一同に介しました。活気があって「大会だ!」という気持ちになりました。
結果
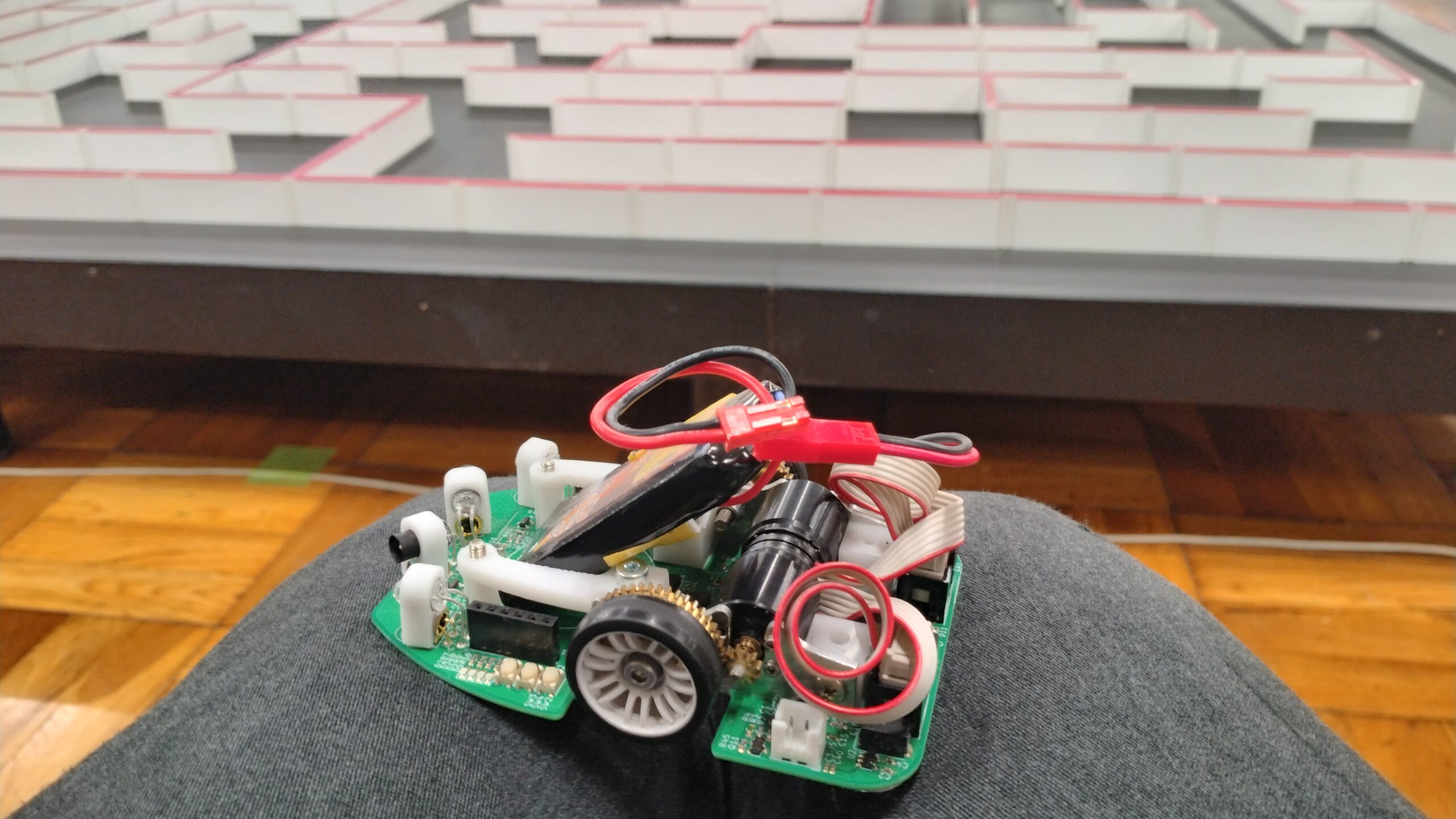
出走順と機体名:CA30 バロース
1:01:33.430 探索
2:00:21.707 最短
3:R
4:R
1,2走行ともに安定して走行し、完走できました。探索に関しては袋小路での前壁を利用した位置姿勢の修正がうまく効いてくれました。最短は思っていた経路とは違う経路を走行したのでアルゴリズムがどうなっているか今後確認していきます。
3走目は速度を上げて走行させましたが、中盤のスラロームで引っかかりリタイヤとなりました。4走目は準備した最速のパラメータでしたが直進時に柱に衝突してリタイヤとなりました。


反省
反省点として大きく2つで、競技時間5分をうまく使えていなかったこと、ちゃんとフレーム固定していなかったことになります。
競技時間5分はとても短かったです。いかに走行自体に時間を割けるかが重要になります。無駄な部分を詰めきれていませんでした。モード選択や走行時の待ち時間等減らせる所はいっぱいありました。また、タイヤ掃除ももっと練習するべきだったと今では思います。競技時間の限られた中でどれくらいの時間がそれぞれでかかるのか想定することは大切です。
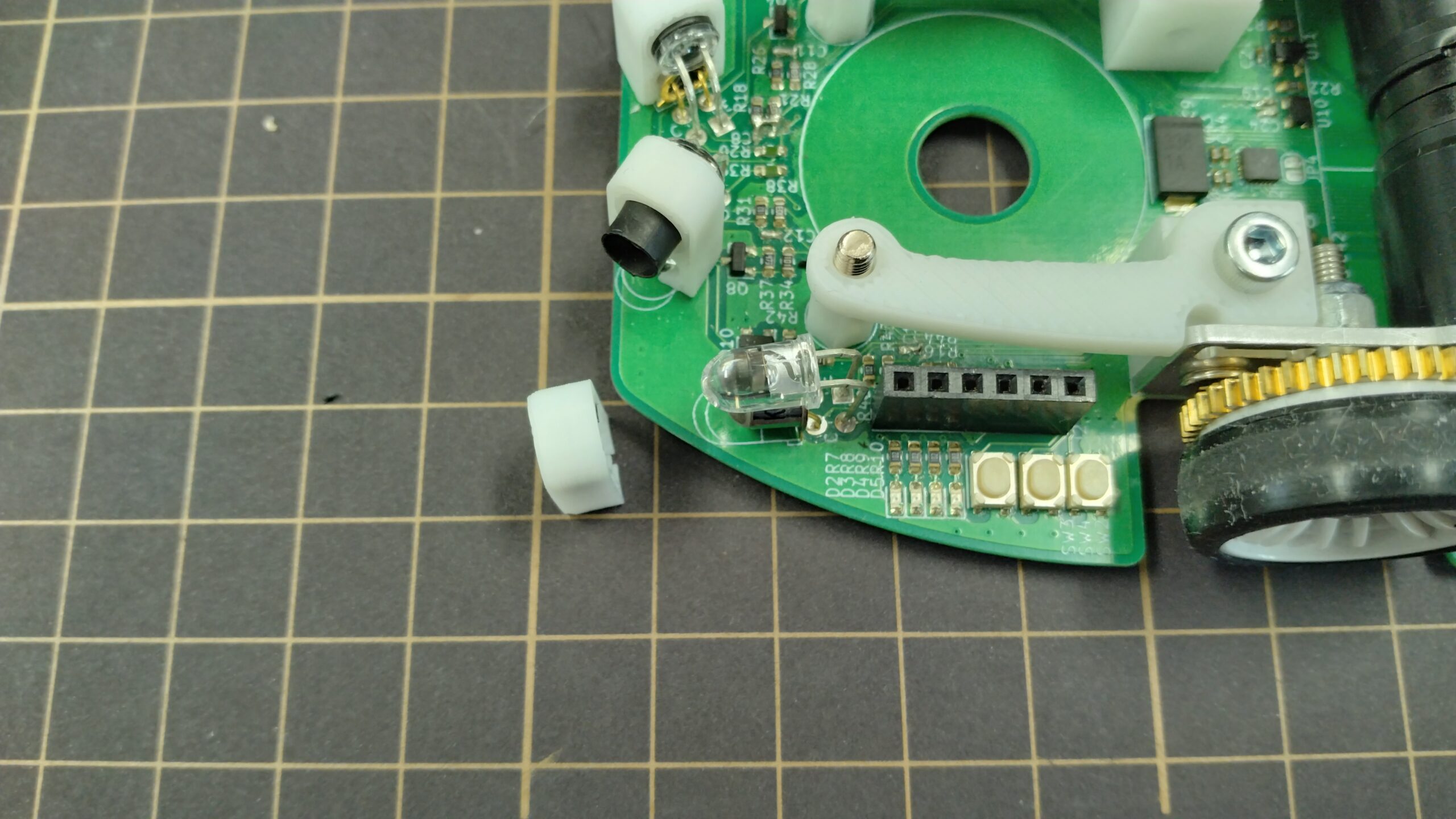
2つ目は壁検出用のADセンサの位置姿勢固定用に取り付けていた、3Dプリンタで製作したフレームが走行中に外れました。メンテナンス性を考えて、接着剤等を使わずにはめ合いでLEDに固定していました。大会時にメンテナンス性は必要ないので固定しておくのが無難です。
リタイヤの原因として、タイヤの清掃忘れとフレームのずれによるセンサ値変化の可能性が少なからずあり、今後は同じことはしないように準備したいと思います。上記の2つの事例を含めてマウス十則を思い出しました。
今年度のまとめ
昨シーズンはスタートを切るで終わりました。その段階でハードウェアはほぼ完成していました。そのおかげで、今シーズンは主にはソフトウェアの開発に注力することができました。
足回りのハードウェアもコンセプト通り素直に動いてくれたのでハードウェアとの相性で悩むことはありませんでした。
スケジュールと開発進捗
今シーズンが始まった段階で完走目標を9月末に設定しました。これは地区大会での完走を考えた設定になります。昨シーズンは全日本の出場にポイントが必要ありませんでしたが、今シーズンは必要だったため、地区大会での完走が必須でした。
結果を見ると開発が間に合わず、北信越大会(10月10日)は別機体(Pi:Co)で出場しています。
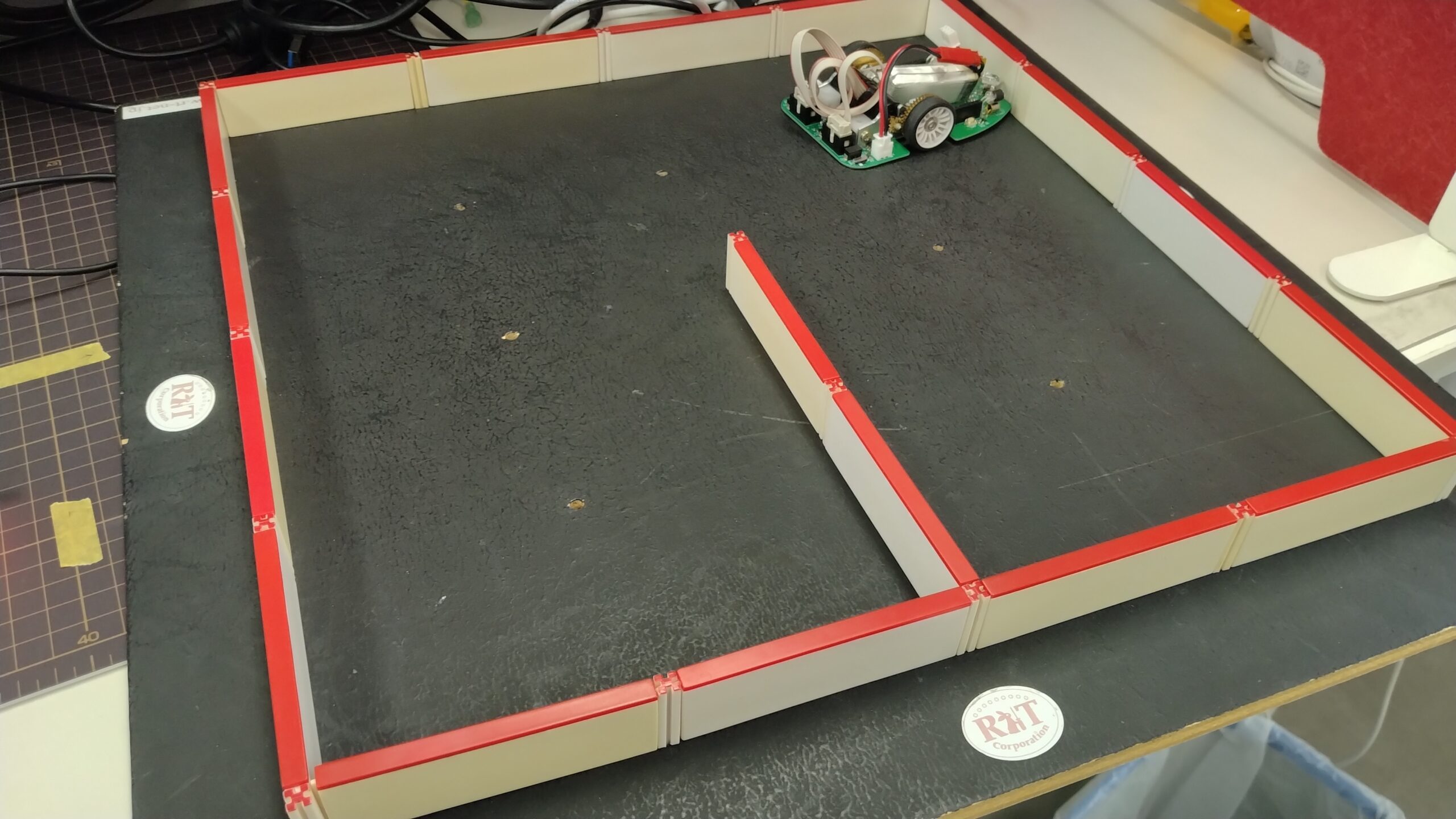
10月の段階では、迷路探索が可能な状態まで実装していましたが、走行系のバグで2×2サイズの迷路を超信地旋回で何とか走行する状態でした。当初、この段階で完走して、吸引機構の搭載を進める予定でしたが、間に合わなかったので予定を変更しました。
その後12月上旬頃に低速(0.2m/s)で16×16の迷路をスラロームで探索できるようになり、大会までの2ヶ月で速度上昇と安定性向上を目指し開発、細かい部分の修正をしていました。
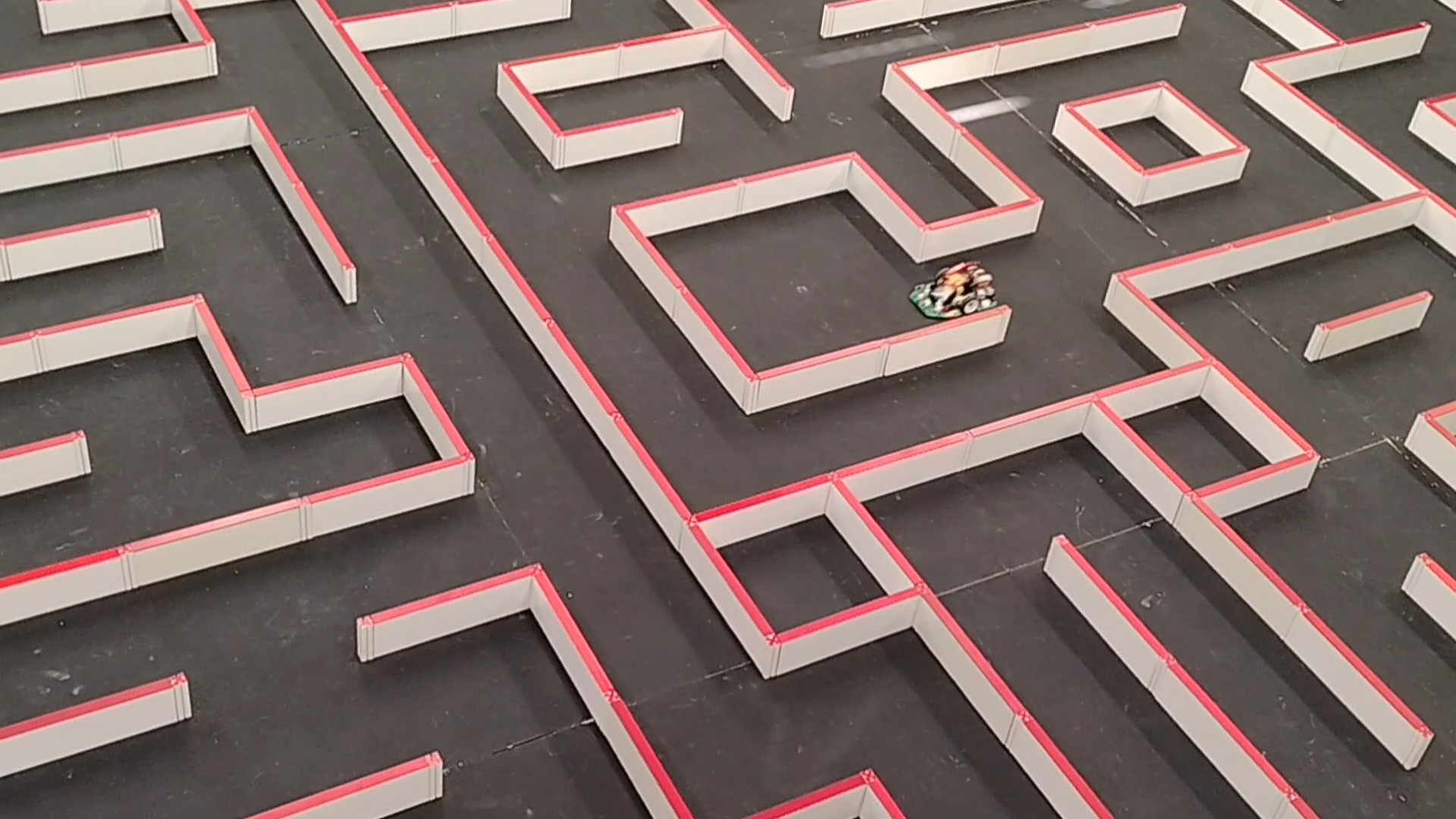
迷路をある程度走行できるようになっても、小さい迷路ではうまく走行できて、大きい迷路では走行できないことが多々ありマイクロマウスの難しさを体感しました。
まとめ
研修としての目標である、自作機での完走を達成しました。
なにはともあれ完走できてよかったです。
今後は、大会で見えた問題の対応、未搭載だった吸引機構、斜め最短走行とかやってみたいと思っています。