

はじめに
はじめまして。アールティの加藤です。2023年5月に新卒で入社いたしました。大学では AR (Augmented Reality) ツールを利用した移動ロボットのセンサの検査や、オドメトリのキャリブレーションについて研究していました。好きなものは対向二輪型移動ロボットのオドメトリです。最近はシェル芸で遊んでいることが多いです。この連載では社内研修で行ったロボット製作について書いていこうと思います。よろしくお願いします。
研修について
アールティでは全社員がマイクロマウス研修を行います。マイクロマウス研修を行う目的については以下の記事に詳しく書かれています。また、マイクロマウス競技についての詳しい情報は公益財団法人ニューテクノロジー振興財団のウェブサイトに詳しく書かれています。

今回の研修で製作したロボットは、アールティが開発したマイクロマウス学習キット Pi:Co Classic3 です。名前の読み方は「ピーコ クラシック スリー」ですが、縮めて「ピーコ」と呼ばれることが多いようです。

Pi:Co Classic 3
この研修のひとまずの目標は、製作した Pi:Co Classic3 を用いて16マス×16マスの迷路を走破することです。この目標を達成するためにはロボットに関する様々な技術やノウハウが必要となりますが、丁寧なマニュアルが用意されているので未経験の方でも安心して研修を行えます。

16×16の迷路を走る Pi:Co Classic3 の様子
それではこれからマイクロマウス研修について書いていきます。研修の内容は大きく分けて、基板のはんだ付け、機体の組み立て、PCの環境構築、プログラミングの4つから構成されています。本連載の Part. 1 ではこれらを一通り終わらせて、Pi:Co Classic3 を迷路で走らせるところまでまとめようと思います。
はんだ付け
まずは基板のはんだ付けを行います。Pi:Co Classic3 には、練習基板、電源基板、メイン基板、CPU基板、センサ基板の5つの基板があります。最初に練習基板ではんだ付けの練習を行いました。はんだ付けは学生の頃にやったことがあったので、練習によって、そのときの勘を少しだけ取り戻すことができました。
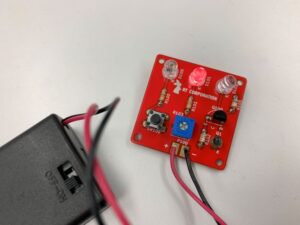
練習基板 : 電池ボックスから電気が供給されて LED が光る
次に、電源基板、メイン基板、CPU基板、センサ基板のはんだ付けを行いました。三端子レギュレータや電解コンデンサなどは取り付ける向きが決まっているので、解説に従って慎重にはんだ付けします。また、コネクタやピンヘッダは基板に対して垂直に取り付ける必要があるため、テープで固定してからはんだ付けすると良いと思います。パーツにテープを貼りながらはんだ付けを行っている様子については、以下のd-satoさんの記事を参考にしてください。
このようにテープを貼って固定した後、はんだ付けを行います。

テープを貼ってはんだ付け
基板の動作確認
その後、電源基板とメイン基板がしっかりはんだ付けできているかどうかを調べるために動作確認を行いました。動作確認では、いきなりバッテリーを接続しても良いのですが、念のためにテスターで導通チェックを行ってから接続したほうが安心です。ちなみに、私はテスターの使い方を完全に忘れてしまっていたため、先輩に教わりながら導通チェックを行いました。
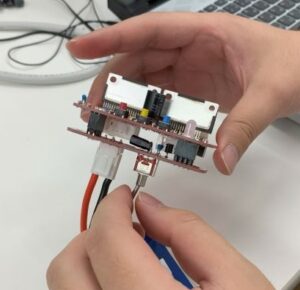
バッテリーを接続してスイッチを入れる直前の様子

無事に LED が点灯!
組み立て
はんだ付けが終わって Pi:Co Classic3 のパーツが全て揃ったので、いよいよ組み立て作業を行います。それぞれのパーツをネジで固定するだけの単純な作業ではありますが、自分のロボットが組み上がる瞬間はいつも楽しいものなので、皆様にもぜひ体験してみてほしいです。
以下の画像が組み立て開始時の様子です。

組み立て開始時の様子
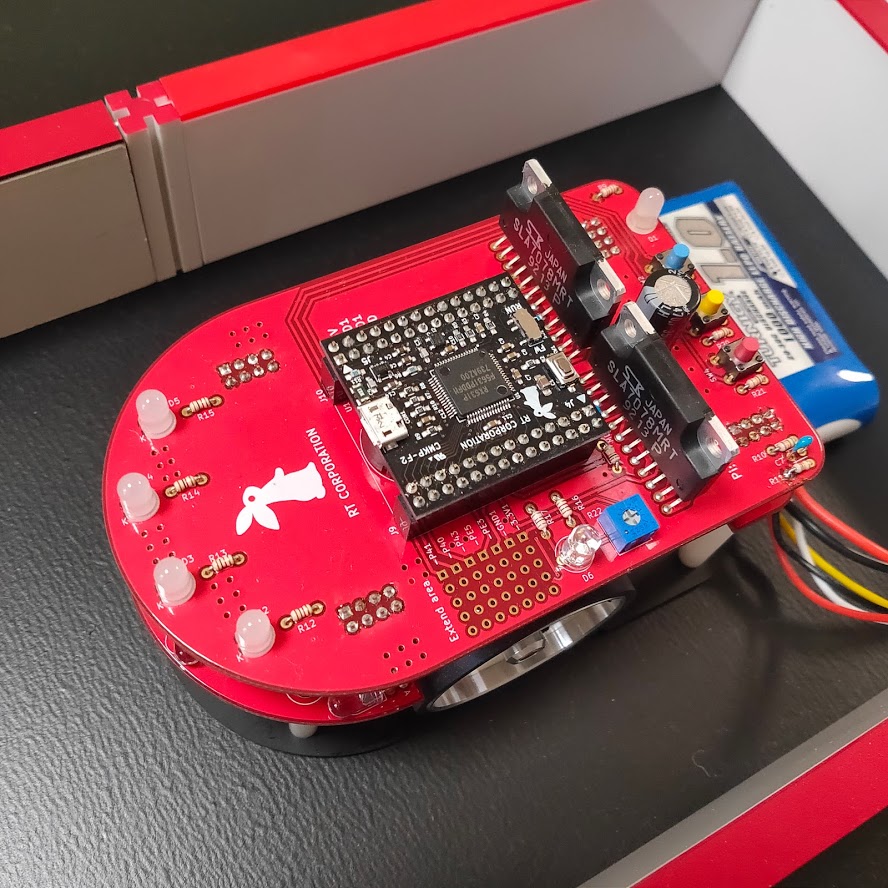
30分ほどで完成しました。Pi:Co Classic3 は、赤色が映えていて綺麗だと思います。

完成した Pi:Co Classic3
マイコンへの書き込み
それではさっそく、完成した Pi:Co Classic3 のマイコンにサンプルプログラムを書き込みます。ソースコードをビルドしてマイコンに書き込むためには PC の環境構築を行う必要がありますが、マニュアルに懇切丁寧な解説が書いてあるので特に迷うことはないと思います。

マイコンにプログラムを書き込んでいる様子
注意点として、Windows PC で環境構築をしてマイコンへの書き込みを行ったときに、エラーが発生して書き込みに失敗する場合があります。このエラーに関しては以下の槇原さんの記事に対処方法が書かれているので、同様のエラーが発生して書き込めない方は参考にしてみてください。

初めての走行
最後に、全ての準備が整ったところで、完成した Pi:Co Classic3 を迷路で走らせてみました。迷路の大きさは6マス×4マスです。小さい迷路ではありますが、スタートからゴールまで何事もなく走破できました。やっぱり自分で製作したロボットがちゃんと走ってくれると感動するものですね。

初めての走行
6マス×4マスの迷路を完走したときの動画も載せておきます。
おわりに
本記事では、Pi:Co Classic3 のはんだ付け、組み立て、走行について書きました。Pi:Co Classic3 はロボット開発で必要になる要素を広く学べてとても楽しいです。特に自分が作ったロボットが初めて走る瞬間はとても感動するので、皆様もぜひ製作してみてください。
次回の記事では、スラローム走行の実装と、16マス×16マスの迷路を完走したことについて書いていきたいと思っています。それでは、また。