
こんにちは、しおたにです。
前回、ギア比を決定しました。タイヤまわりの構造について考えます。
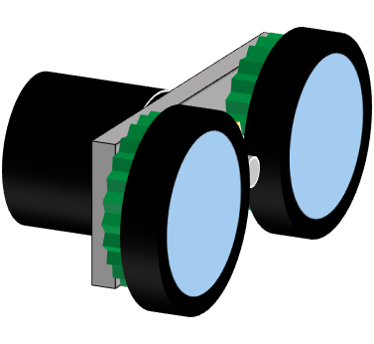
基本的な構造は前回紹介したように、マウンタにモータやギア、タイヤを取り付け、タイヤの間にあるピニオンで両輪を動かすというものです。

これからタイヤをどのようにしてマウンタに固定していくのかをまとめていきたいと思います。
よくある構造
ネジを軸とし、ホイールにベアリングを2つ入れ、ホイールにギアを取り付けた形をよく見ます。



ギアは削り出しもしくは購入品で、ホイールはこちらのようなラジコン用タイヤが良く使われています。
スペーサはベアリングの内輪と接するように入れ、ネジを締め付けるとベアリングとホイールの位置が決まるようになっています。
この構造をベースにしたいと思います。
変更点?:ギアとホイールを一体化
例の構造ではギアとホイールは圧入やねじによって固定しますが、あまり器用ではないので組み立て精度が期待できません。
タイヤは高速で回転するためわずかなズレや傾きが大きく影響してきます。
後述しますが別の理由もあります。
ということで今回は。ホイールとギアを一体化し、CNCによる両面切削で作製したいと思います。
切削方法はそのうちまとめたいと思います。
変更点?:ネジを軸にしない
これは個人的な考えによるものです。
軸がネジでもみんな問題なく走っています。
ただ、ネジは回転軸としては作られていないので、回転軸として使うとどうなるのかという個人的な考えをここで言いたいと思います。
ギザギザしている
ギザギザこそネジをネジたらしめるものですが、軸として使うにはなんだかなぁと思っています。
本来ネジは穴が開いた物体同士を締結するためのものです。
一方回転軸として求められる役割は軸受けをブレなく保持することです。
ギザギザしているのでベアリングと接し方が安定しません。しっかりベアリングを保持できないと、ベアリングが傾いてしまったり、回転中心がズレるなどが考えられます。
はめあい公差の話
ブレなくベアリングを保持するためには然るべきはめあい公差(≒許容できる寸法のズレ)があります。
一般的にな軸とベアリングのはめあい公差はこれ(参考)くらいです。
簡単に説明すると、
内輪が静止するような使用法の場合、軸の基準寸法を3[mm]とすると公差はg6、つまり許容される隙間は基準寸法から-4[μm]?-12[μm]の間となります。(参考資料)
ベアリングの内径は等級にもよりますが呼び内径から数[μm]程度の範囲内に収まるようになっています。
つまり両者の隙間は10[μm]前後が一般的でしょうか。
外径の寸法精度が気になる
一方でネジを見てみましょう。
M3メートル並目ネジの外径は2.874[mm]?2.980[mm]で作られています(参考資料)。
つまり、モノによっては100[μm]くらい隙間が空くことになります。
隙間が大きければタイヤが軸に対し斜めに装着されたり、回転時のブレ幅が大きくなるため、ロボット全体が上下動したりタイヤの推進力が地面に伝わりづらくなります。
ベアリングは精度よくできているのでブレなく効率よく回ってくれますが、これではせっかくの高精度もネジで台無しになっているようにも思います。
というわけで、軸についてはベアリングを保持することを前提に作られているベアリング押さえピンを使いたいと思います。
ベアリング押さえピンであれば円柱部分の外径公差はg6で作られており、精度は気になりません。
また、円柱部分をマウンタに差し込む形とすれば、軸間距離もある程度精確にすることができます。
とはいえ
ここまで数[μm]が大事だみたいなことを書いてきましたが、これは一般的な機械向けの話です。それらは要求される精度や寿命、安定性が大会用ロボットとは比べ物になりません。
それにパーツの加工精度がそこまで高くありません。上手くいって10[μm]単位でしょう。それでもネジを使うよりはマシだと考えて進めたいと思います。
ネジ軸のメリット
さて、ネジ軸にもメリットはあります。
ネジをM3とした場合、外径6[mm]のベアリングを使うことができます。
この6[mm]の穴はホイール側にもあり、簡単な追加工でぴったりあうようです。
ベアリング押さえピンの外径は最も細くて4[mm]だったので使えるホイールが見つかりませんでした。ホイールを自作することにします。
どうせホイールを自作するならギアも一体化してしまおうというのが変更点?の理由でもあります。
変更後の構造
ホイールとギアを一体化し、軸にベアリング押さえピンを採用し、少し手を加えたものがこちらになります。



今回はここまで。