 加藤の自作マイクロマウス研修
加藤の自作マイクロマウス研修 基板の配線から発注まで – 加藤の自作マイクロマウス研修 Part. 5
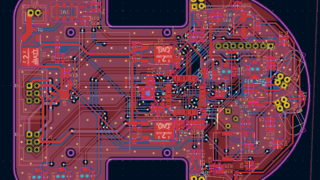
こんにちは、アールティの加藤です。本連載ではオリジナルのマイクロマウスを製作する研修(自作マイクロマウス研修)について書いていきます。前回の記事ではAutodesk Fusionを使用して基板外形やモータマウントなどの機体設計を行いました。...
 加藤の自作マイクロマウス研修
加藤の自作マイクロマウス研修  100日後に完走するマウス(倉澤ズズくん)
100日後に完走するマウス(倉澤ズズくん)  100日後に完走するマウス(倉澤ズズくん)
100日後に完走するマウス(倉澤ズズくん)  マイクロマウスPi:Co改造研修(河野)
マイクロマウスPi:Co改造研修(河野) 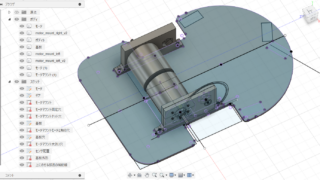 加藤の自作マイクロマウス研修
加藤の自作マイクロマウス研修  自作マイクロマウス研修(槇原)
自作マイクロマウス研修(槇原)  100日後に完走するマウス(倉澤ズズくん)
100日後に完走するマウス(倉澤ズズくん)  加藤の自作マイクロマウス研修
加藤の自作マイクロマウス研修  加藤の自作マイクロマウス研修
加藤の自作マイクロマウス研修  100日後に完走するマウス(倉澤ズズくん)
100日後に完走するマウス(倉澤ズズくん)