

はじめまして、学生アルバイトのhayashiです。
簡単な自己紹介。
普段は、大学でRoboCupの活動を中心に学生生活をしています。基本的に、ソフトウェアの開発をしています。元々は、ロボットが好きなので、ハンダ付けもハード設計、組み立てもやりたい人なのですが、あまりやる機会はないです。
そして、縁あって、3月に先輩からお誘いを受け、RTでアルバイトさせていただけることに。
雑用でもなんでもする気持ちで、普段は、ソフトウェアを書いていますが…
アルバイトに行くたびに誰かがマウスを動かしている(しかも自作)。
それを見ていたらやりたくなりますよ!!
しかし、マウスの知識もない経験もない、しかも、「ワタシアルバイト」と思っていたら、「やりたい?」と言われ、「何事も経験」「マウスはロボットの基本」など、意見をいただき。
やらせていただけることに…
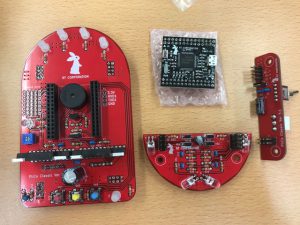
という事で、渡されたのが「Pi:Co Classic3」のキット

画像は完成図です。
キットなので、ハンダ付け、組み立てがありますが、説明書通りに進めれば良いので、マウス初心者でも安心ですね。
説明書は付属のカードからダウンロードできます。説明書は、各分野にわかれていますし、内容もわかりやすくなっているので、ロボット初めての人でも難しくなさそう…(主観です。)
最初は、ハンダ付けからです。
説明書には、部品をつける順番や向きが丁寧に書いてあるので、あとは自分のハンダ付け次第です。とは言っても、普段全然ハンダ付けをしていないので大変そう。
ハンダ付けのコツは、ハンダしたい部分を温めてから付ける。ということらしいです。
そして、早速…

熱し過ぎのせいで、コネクタが溶けて真ん中のピンが歪んでしまいました。運良くこの部分は、何も繋がない部分で問題がありませんでしたが、今後は起きない無いように気をつけながら…
さすがに、ロボット1体なので、ハンダ付けの部分が多い(まだ、少ない方だとか…)
全部、ハンダ付けするとこんな感じです。
次回は、プログラムをして、大会に参加したいと思います。