
こんにちは、山本です。
インターンシップで、近日公開予定の「Pi:Co V2 Eclipse開発環境構築マニュアル」を読んで実際に開発環境を構築し、Pi:Co V2を迷路で走らせました。
インターンシップの課題としてマニュアルのレビューを行い、問題点がないか確認していきます。しかし私は、そもそもマイクロマウスに触れたこともない上に、プログラミングも学び始めたばかりです。インターンシップ初日に、Eclipse を使いますと伝えられたときはとても不安でした。
しかし、参照するマニュアルは初心者の私でも進められるようになっていたので、すんなりと環境構築ができました!
今回はそんな私の体験談も交えながら、みなさんにEclipse IDEの環境構築の紹介をしていきたいと思います。また、環境構築マニュアル同様に、近日公開予定のEclipse用のPi:Co V2サンプルプログラムを使い、実際に迷路を走らせてみようと思います。
どうぞよろしくお願いします。
Pi:Co V2って?
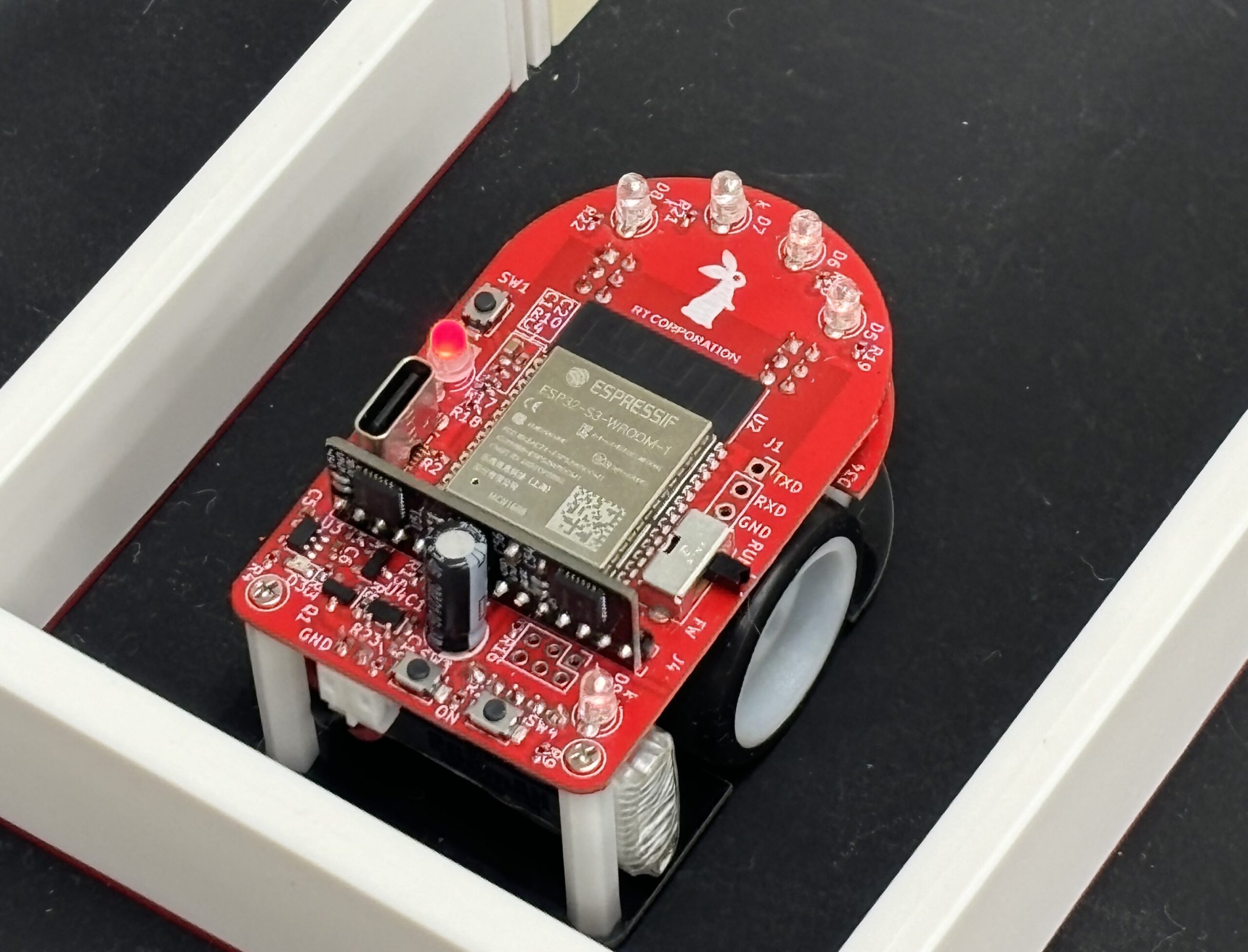
はじめにPi:Co V2の紹介をします。
Pi:Co V2(ピーコブイツー)は、アールティの教育や研究開発用小型移動ロボットのプラットフォームであるPi:Co Classic3同様、ソフトウェア開発の基礎を学びたい方に手に取っていただきたいロボットです。
Pi:Co Classic3の機能やデザインイメージをそのままに、半分のマイクロマウスサイズになっています。
マイクロマウス競技に準拠しているのでもちろん大会参加もできます。
Pi:Co V2はESP32-S3マイコンを搭載しており、Arduinoでも開発できます。
移動型ロボットのビギナーや、研究者、開発者まで幅広い方々にご利用いただけるロボットです。
ショップのURLはこちら↓

環境構築
Eclipse IDEのインストール
それでは作業を始めていきます。Eclipse IDEをインストールする際に、GitとPythonを使用するので、あらかじめインストールしておきます。
GitやPythonのインストール方法もマニュアルに記載されています。初めての作業なので、作業自体は大変でしたが、マニュアルが丁寧に画面の写真まで使って説明してくれたのでストレスなくできました!
その上、このマニュアルにはWindows版、MacOS版、Linux(Ubuntu)版と丁寧にそれぞれ説明してくれているので、自分が使用するPCの種類の心配は必要ありません!正直、少し感動しました。
GitとPythonのインストールが終わり、遂にEclipse IDEをインストールしていきたいと思います。
しかし中盤、ESP32の開発用プラグインのダウンロード時に突然エラーが起きてしまいました。「指示通りやっていたはずなのにどうして?」エラー欄をみたら、どうやらPython が見つからないようです。Pythonは指示通り入れたはずなのにどうしてでしょうか?
時間をかけて試行錯誤したところ、やっと原因がわかりました!
ESP32開発用プラグインをダウンロードした後、インストールするために使用するPythonが、デフォルトで指定されたパスとは別の場所にインストールされていました。よってPythonがないとエラーが出てしまい、インストールができていませんでした。
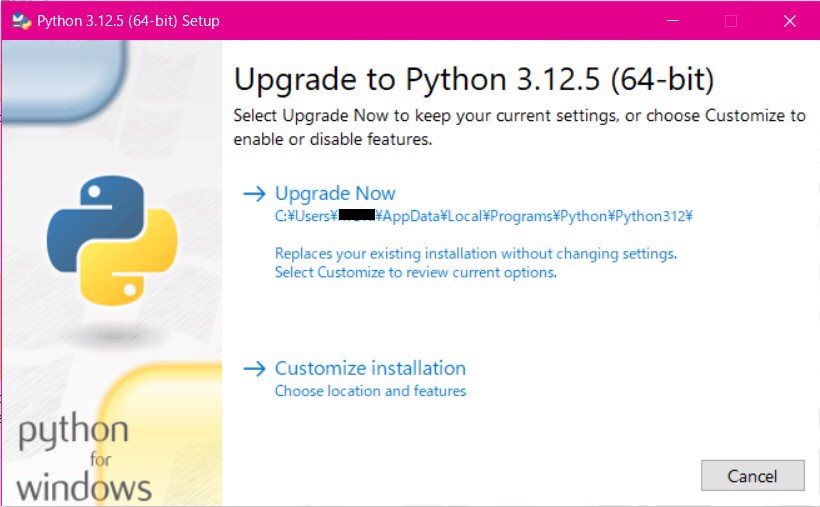
Pythonのインストール先はインストール時に確認できます。
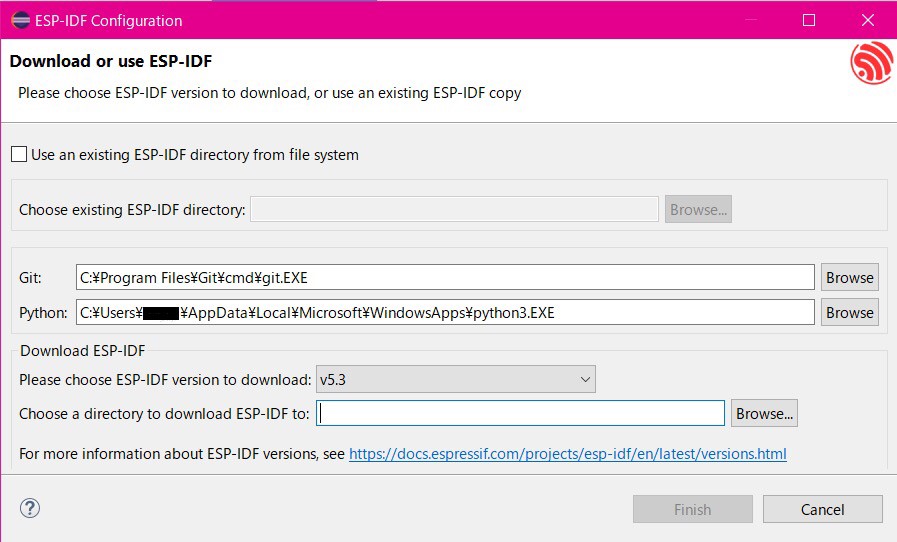
(上画像のPythonに欄に指定されているパスが間違えていました。横にある「Browse」から修正します。)
通常インストールを行った際の場所は、調べると出てきました。私のパソコンを確認すると同じ場所にインストールされていました。
先ほど確認したパスを指定したらうまくできました!
これにて、なんとか全ての行程が終わり開発環境の構築が完了しました!
エラーが出なければ、さくさく行けるのですが、私みたいにエラーがでると時には何時間もかかってしまいます。その予防にもファイルの参照先などはしっかりと確認した方がいいと思いました。
これは、マニュアルではわからなかった部分でした。みなさんに公開する前に発見できてよかったです。
走行お試し動画
さて、環境構築も終わったので、プログラムをインポートして実際にPiCo V2に迷路を走らせてみます。とはいえ初めてのマイクロマウスです。Pi:Co V2購入者限定コンテンツの「Pi:Co V2ソフトウェア解説マニュアル」をみて9×9の小さい迷路を試走させました。
無事、完走することが出来ました!
動画では、上手く走れていますが、たまに壁に当たってしまうのでそこは要調整です。
ですが、目的の迷路攻略は完遂できたので良かったです!
最後に
Pi:Co V2は、Arduino IDEによるソフトウェア開発も可能です。Arduino IDEの環境構築マニュアルとサンプルコードは一般公開されています。加えて、Eclipse IDEでもPiCo V2の開発ができるように、開発環境構築マニュアル、サンプルコードが近日一般公開されます。みなさんお好みの開発環境を選んで開発していただけるようになります。
また、試走で使用したEclipse版の「Pi:Co V2ソフトウェア解説マニュアル」もPi:Co V2購入者限定コンテンツとして近日公開予定です。Arduino版の解説同様、詳しく解説されています。公式アナウンスをお待ちくださいませ。
Pi:CoV2発売中!
Pi:Co V2は2024年6月25日に販売開始しました。
組込みや自律制御の基本要素を学ぶ方々はぜひ本製品をご利用ください。
Web shopにて、定価60,000円(税込)で絶賛発売中です。ご利用をお待ちしております!