

こんにちは、アールティの加藤です。
アールティが販売する小型移動プラットフォームロボットRaspberry Pi MouseのROS 2パッケージを更新しました。最新のROS 2長期サポートディストリビューションであるHumbleに対応しています。本記事ではHumble版パッケージの変更点と簡単な導入方法について紹介します。
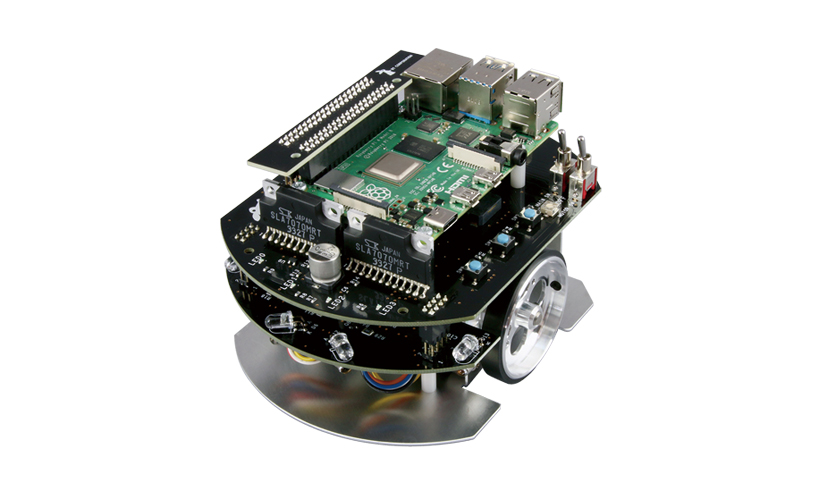
Raspberry Pi Mouseの紹介
Raspberry Pi MouseはメインボードにRaspberry Piを使用した左右独立二輪方式の小型移動プラットフォームロボットです。全長13cm、重さ700gと小型であるため、持ち運びや開発スペースの確保も簡単です。
ROS 2パッケージを利用すると、たとえば次の動画のように、特定の色の物体を追従するような動作や周囲環境の地図を作成するSLAMなどが簡単に行えます。
Raspberry Pi Mouseの詳細な特徴については、下記の製品ページをご覧ください。
Raspberry Pi Mouseは下記の販売ページから購入できます。ROS 2パッケージは無償で公開しているため、購入前の参考にご利用ください。

Humble版パッケージの紹介
Raspberry Pi Mouseの4つのROS 2パッケージがHumbleに対応しました。各パッケージの詳細についてはそれぞれのREADMEをご覧ください。
- raspimouse2 : 制御用パッケージ
- raspimouse_ros2_examples : サンプル集パッケージ
- raspimouse_slam_navigation_ros2 : SLAMとナビゲーションのパッケージ
- raspimouse_description : ロボットモデルパッケージ
Foxy版のパッケージが必要な場合はfoxy-develブランチを参照してください。ただし、2023年6月にROS 2 Foxy FitzroyがEOL(サポート終了)を迎えました。それに伴い、Raspberry Pi MouseのROS 2パッケージもHumble版をメインにメンテナンスしていく予定ですのでご注意ください。
インストール方法
ROS 2環境のセッティングやパッケージのインストール方法は、下記のSoftware Tutorialsをご覧ください。
次のコマンドを実行すると、Raspberry Pi Mouseの全てのROS 2パッケージをインストールできます。
sudo apt install ros-humble-raspimouse-slam-navigation以上でインストールは完了です。
サンプル集の動作手順例
ここではジョイスティックコントローラでRaspberry Pi Mouseを走行させるサンプルを紹介します。このサンプルを実行するためにはジョイスティックコントローラが別途必要ですのでご注意ください。また、詳しい実行方法についてはREADMEをご覧ください。
まず、下記のコマンドを実行してノードを起動します。このコマンドではLogicool Wireless Gamepad F710を使用します。
ros2 launch raspimouse_ros2_examples teleop_joy.launch.py joydev:="/dev/input/js0" joyconfig:=f710 mouse:=trueノードが起動したら、READMEの説明に従ってジョイスティックコントローラを操作することで、Raspberry Pi Mouseを動かせます。
おわりに
本記事ではRaspberry Pi MouseのROS 2パッケージHumble版を紹介しました。これらのパッケージを利用すると、カメラによる物体追跡や、LiDARを使ったSLAMとナビゲーションなど、各種サンプルが簡単に実行できますので、ぜひお手元でお試しください。サンプルの実行方法についてはSoftware TutorialsのROS/ROS 2サンプル集の実行をご覧ください。