
はじめに
こんにちは、河野です。この記事はマイクロマウス研修についての記事です。研修では自作マウスで大会へ出場し迷路完走することを目標としています。
前回はセンサ基板への部品のはんだ付けまで行いました。一部、動作不良があったので原因の調査を行います。
動作不良の原因調査

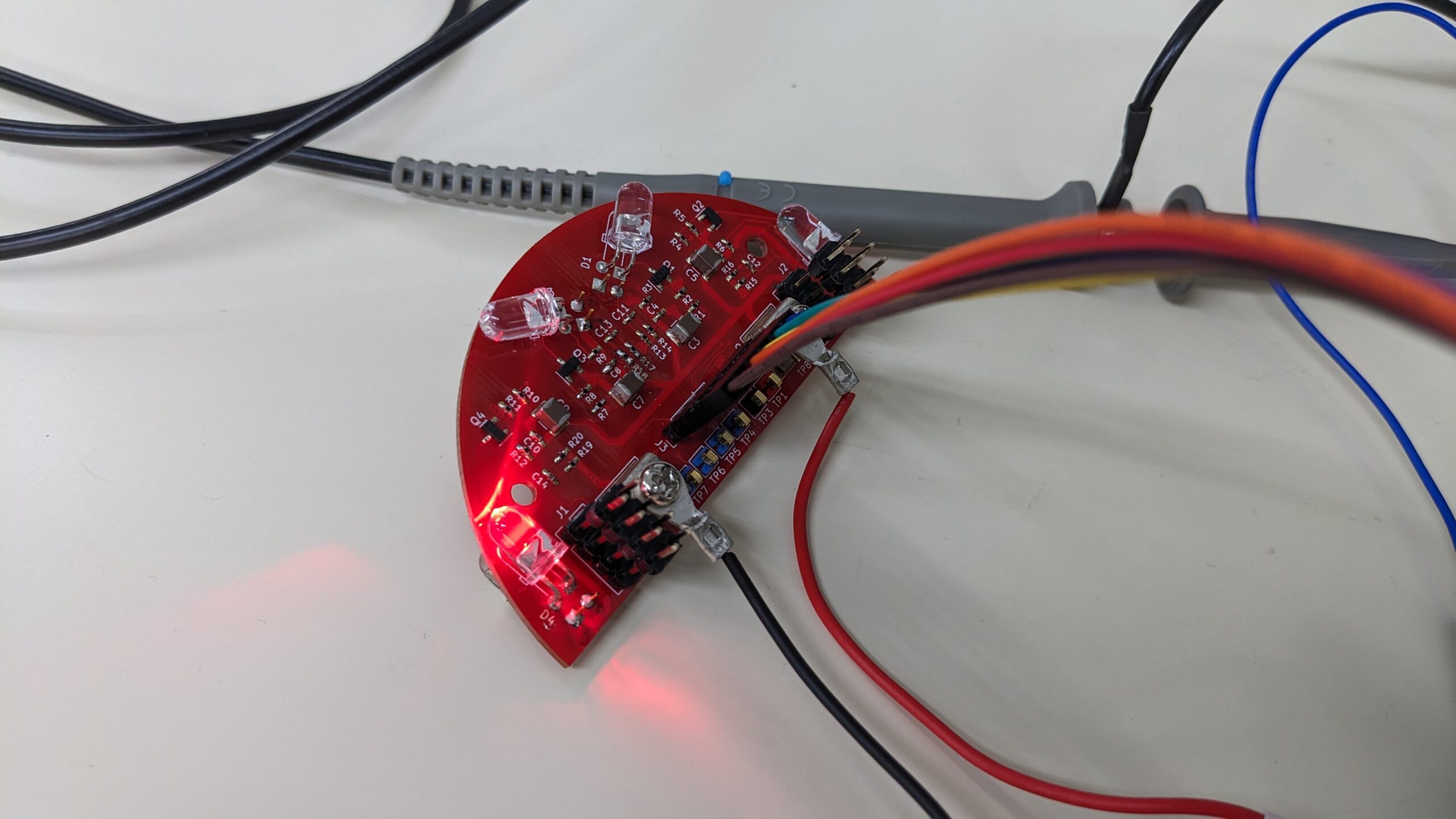
上の画像の右側2つのLED(D3、D4)が点灯しませんでした。疑うところとしては、LEDの向き、はんだ不良、素子の故障などが挙げられます。これらの確認については、目視やテスター、オシロスコープなどを用いて行います。
結果から言うと、D3は抵抗のはんだ不良、D4はLEDの逆付けが原因でした。
D3の原因調査は、オシロスコープを用いて行いました。電源を入れ、ファンクションジェネレータでLEDの入力を入れた際に、オシロスコープのプローブを当てて回路のどこまで信号が来ているかを確認しました。この時、闇雲に当てていては大変なので、回路を見つつ順番に確認することが大切だなと感じました。
D4については、目視でLEDが逆付けされていることを確認しました。一応念のために、D3と同じようにオシロスコープで信号が届いているかの確認も行いました。
D3、D4それぞれ、はんだ付けの修正を行い…

無事に動きました!
基板単体で動作確認が出来ることが本当に素晴らしい!このような設計の重要性をひしひしと感じています。
Pi:Co Classic3への取り付け
基板単体での動作確認が完了したので、Pi:Co本体に取り付けての動作確認を行います。
ここで、取り付ける前にピン配置がセンサ基板とPi:Coのメイン基板とで合っているかを再確認します。細かいところまで確認しながら一歩一歩進むのが大事…。早く動かしたい気持ちで、このような確認をすっ飛ばしがちなので気を付けていきたいです。
ピン配置も合っていたので取り付けて、
電源投入!

無事に動きました!基板設計から発注・実装と長い道のりでしたが、ここまで来れて感動です!
設計思想を形に出来たこの瞬間にものづくりの醍醐味を感じています。
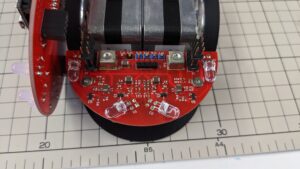
走行
ちょうど迷路が解放されていたので、走行させての動作確認も行えました。
光軸の調整をしただけで、思ってた以上にすんなりと走ってくれて驚いています。
おわりに
設計から一通りの開発を行うことができて非常に良い経験になりました!
完全な自作マウスに向けて一歩前進できた気持ちです。
次回は、一旦ハードウェアから離れて、PID制御や台形加減速などのソフトウェアを触る予定です。