
はじめに
初めまして!2022年12月に中途で入社しました河野と申します。
前職では自動運転などの画像認識システムの開発を行っていました。認識だけでなく制御も行いたいなと思い、この度転職しました。これからよろしくお願いいたします!
アールティでは、マイクロマウスを題材とした研修を行っています(詳細はこちらの記事)。ロボットについてはほぼ未経験の私ですが、研修を通してロボット制作について学んでいきます。
マイクロマウス研修の最終目標は、メカ・回路・ソフト全てを自作したマウスで大会出場・完走となっています。しかし、いきなりは難しいので、まずはアールティ製のキットである「Pi:Co Classic3」を使用し迷路の完走を目指します。
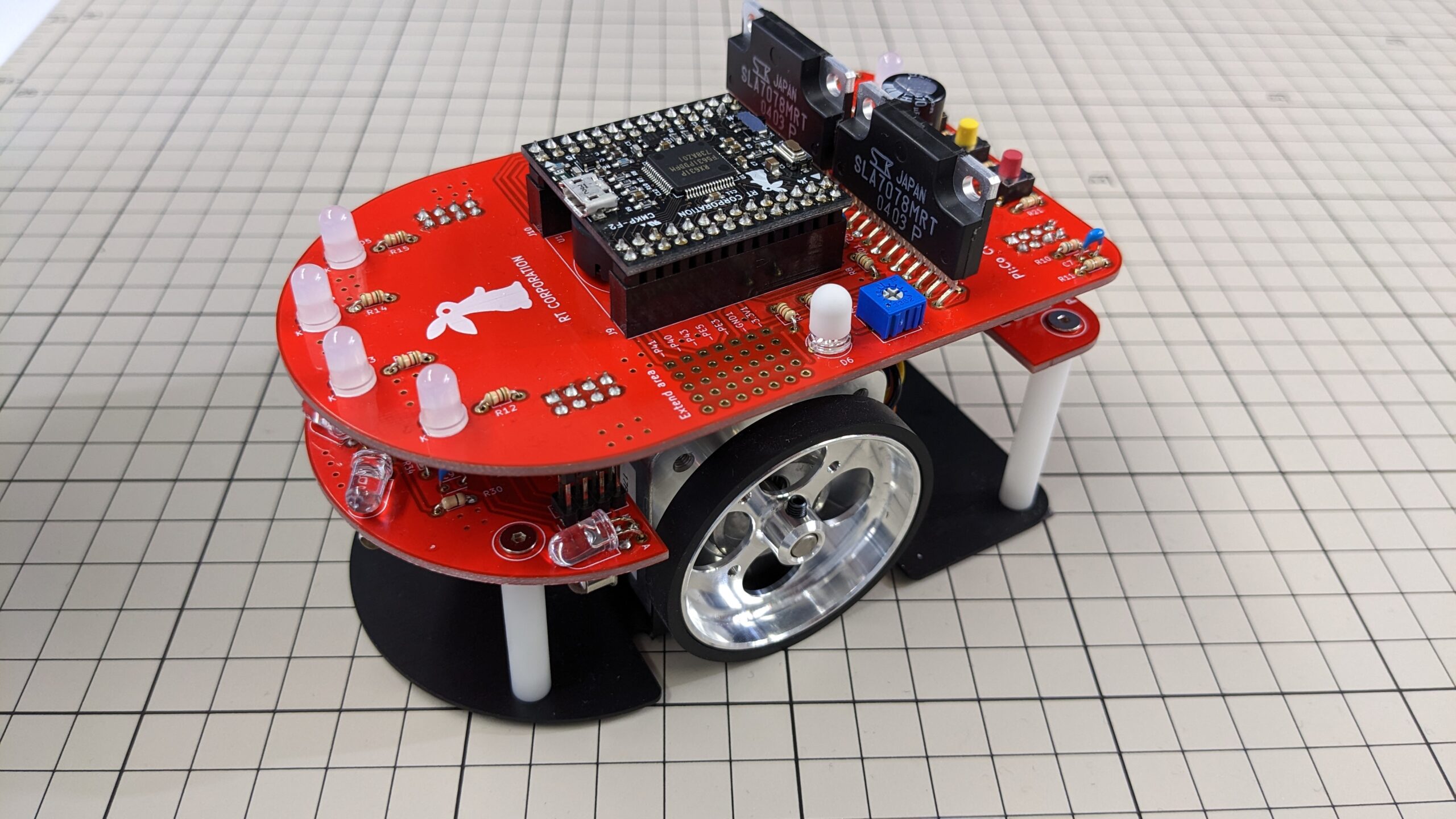
Pi:Co Classic3
組み立て
説明書に従って、各部品を基板へとはんだ付けし組み立てました。はんだ付けは数年ぶりだったので、キット付属の練習用基板で様子を思い出しつつ慎重に行いました。LEDとフォトトランジスタを逆付けしてしまうなどありましたが、なんとかリカバリできて一安心でした。
組み立て後は、さっそく電源投入!…の前にテスターを用いて導通チェックを行います。もしショートなどしていた場合、電源を入れた際にICなどの素子が壊れることがあるので、これを未然に防ぐために行います。今回は、特に問題はなさそうだったのでそのまま電源を入れました。
サンプルプログラム実行
キットにはLチカから迷路走行(超信地旋回)までいくつかのサンプルプログラムが用意されています。まずはこれらのサンプルプログラムで動作確認を行います。
さっそくプログラムを書き込みしようとしたところ、エラーが出て書き込みができませんでした。なんだろうと調べていると、過去の記事に同じエラーを踏んだときの話がありました。すごく助かりました!
実際の迷路で、センサやタイヤ径、トレッド幅などのパラメータを調整してあげて、迷路探索と最短走行ができました!
スラローム走行実装(緩旋回)
サンプルプログラムの迷路探索では、超信地旋回という方法で曲がるようになっています。今回は、よりスムーズな曲がり方である緩旋回の実装を目指します。
shotaさんの記事やはしもとさんの記事を参考に、緩旋回の理論を勉強し実装に取り組みました。研修を見てくださった方の協力もあり、緩旋回での探索走行と最短走行ができました!理論通りに実装した後に調整が必要でした。特に、旋回速度と旋回前後の直線距離の調整が難しかったです。
理論に基づいて実装し、その通りに動いてくれたときはすごく感動しました!ロボット開発の醍醐味を感じました。
おわりに
マイクロマウス研修の第一段階としての「Pi:Co Classic3」キット研修を行いました。目標であった緩旋回を用いたスラローム走行まで完了することができました!
次回からは、Pi:Co Classic3の改造研修を行います!組み立てるだけであったそれぞれの基板を自分で作り直すことで、回路設計や部品の発注方法などを学ぶことを目的とします。さらに、テストパッドの追加など、より良いものになるように改造を施す予定です。