
ご無沙汰しております。
ご無沙汰しております。YUUKIです。
前回、アルミ部材やホイールの組付け、リフローした基板、そしてYMmouseのハードウェア組み上げを紹介して更新が途絶えていました。
これから各々機能の動作確認をしていきますが、スムーズに事は運びません。ここでも多くのミスや不良が発覚したくさん時間を溶かすことになります。
さて、この研修の課題は、全国大会にて自作機体で完走することです。なので各地で開催される予選にて最低1ポイント獲得しておく必要があります。前回記事を投稿した時点でYMmouseの機体は一部機能の動作を確認済みで、作業にそこまで時間はかからないと思っていました。しかし結局間に合わず予選をPi:Co Classic3(以下Pi:Co)にて参戦し、ポイントを獲得することになります。
ただPi:Coでもトラブルがあり、かろうじて主要命題を達成するという苦い経験となりました。
YMmouseに発覚したトラブルは今後の記事で紹介していくとして、今回は、北陸信越地区オンライン大会の報告(大反省会)をしていきます。
北陸信越地区オンライン大会
第39回マイクロマウス北陸信越地区大会は、昨今の感染症拡大により、開催地の確保ができずオンライン大会となりました。このオンライン大会では、5分間5回走行を2000年以降に出題された迷路の中から参加者が自由に選び、完走した動画を撮影しアップロードすることで認定証と年間ランキングの1ポイントが獲得できます。
さて、7月上旬時点ではYMmouseで走ることを目標に頑張っていましたが、いろんなところで時間を溶かし、間に合わず、Pi:Coにて出場することにしました。
北陸信越地区大会のエントリー締め切り一週間前にPi:Coのプログラムを見直し、昨年のPi:Co研修の際に断念した等速円運動スラロームと、探索済み区間加速を実装し、なおかつ見た目のアクセントを加えようということでホイールの塗装を行いました。
「びじゅある系Pi:Co」
※これをすると改造に該当するのでPi:Co杯の対象から外れます。こちら自己責任です。
タイミングよく塗装する案件があり、ついでにマゼンタをホイールに塗装し、プログラムもすんなりビルドできたということで迷路を走らせながら微調整していきます。
上手くいくはずでした…
スラロームの調整や加速時の調整を頑張ればなんとか完走するはず…
最悪ダメでもPi:Co研修時に煮詰めた信地旋回で何とかなるはずと思っていました。しかしセンサーが壁見てない問題が発生します。
調整モードでフォトトランジスタの値を確認しますが、前壁を見ているセンサー同士の値で半分以上の差がありLEDとの光軸を調整しても右側のセンサー値だけ改善しませんでした。
締め切りが迫っていたので深く調査することはやめてPi:Coの強みを活かします。
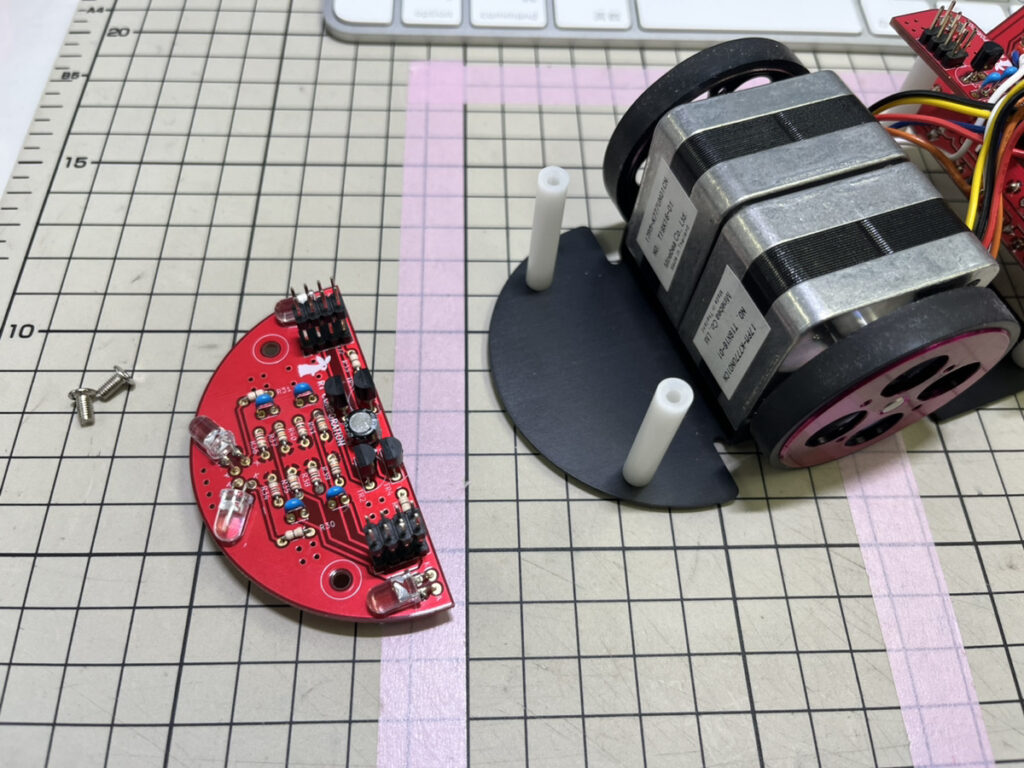
Pi:Coは4つのモジュール基板で構成されており、センサー周りは前方のかまぼこ状の基板に集約されています。これを、別機体から拝借します。再度確認するとセンサー不具合は解決しました。
 見た目ではんだの量が少ない等違和感はないようです。ただ調整のことを考えずギチギチで取り付けていることの問題の一つかも?
見た目ではんだの量が少ない等違和感はないようです。ただ調整のことを考えずギチギチで取り付けていることの問題の一つかも?
続いて等速円運動スラロームです。・・・曲がってくれません。
諸先輩方の資料見直しても自分のプログラムが違うというような内容がない、ぱっと見修正箇所を見つけ出せず時間だけが溶けて焦り始めます。 これではダメなので完走実績のある信地旋回のスラロームに切り替えます。 これで曲がってくれるようになったのですが袋小路の前壁を見てくれなくなります。
つまり、前壁見えないから止まらない問題再発。溶ける時間への焦りから、さらに頭を抱え込みます。
このあたりで一度サンプルプログラムを動かしてみると問題なく動くのでハードの問題でもなく、自分が書き加えた部分に問題が生じていることは明確です。結局、問題箇所を特定する余裕もなく、北信越大会に投稿した動画はほぼサンプルプログラムを動かすのみになってしまうという悲しい結果となりました。
察していただけると思いますが、写真等を全く残しておらず味気ない記事になっています・・・
次回
「もっと頑張りましょう」のスタンプを押されるかのような実力の無さや時間配分の甘さ等を痛感しました。
悔やんでも仕方ないので、気持ち切り替えて自作マウスのほうに目を向けていきます。
次回からは各機能の動作確認と涙のリワークについて紹介していけたらと思います。
それではっ
YUUKI