
はじめましてkaedeです。2022年1月に中途で入社しました。
アールティでは全社員がマイクロマウス研修を受講することになっています。私は学生時代にマイクロマウス大会への参加経験があったため、自作マイクロマウス研修からのスタートです。
マイクロマウスは5年ほどのブランクがあるので、最近の技術に早く追いついていきたいです。初回ブログということで、まずは自作するマイクロマウスのコンセプトの検討からスタートしたいと思います。
新作マイクロマウスを作るにあたって、以下の3つのモチベーションがあります。
- 「妖怪ピニオンすべり」に苦しめられたくない。
- 理論通りに素直に動くハードウェアを用いて、マイクロマウスで用いられることが少ない経路追従や経路生成にもチャレンジしてみたい。
- 自分が試せていない世の中で流行っている技術にキャッチアップしたい。
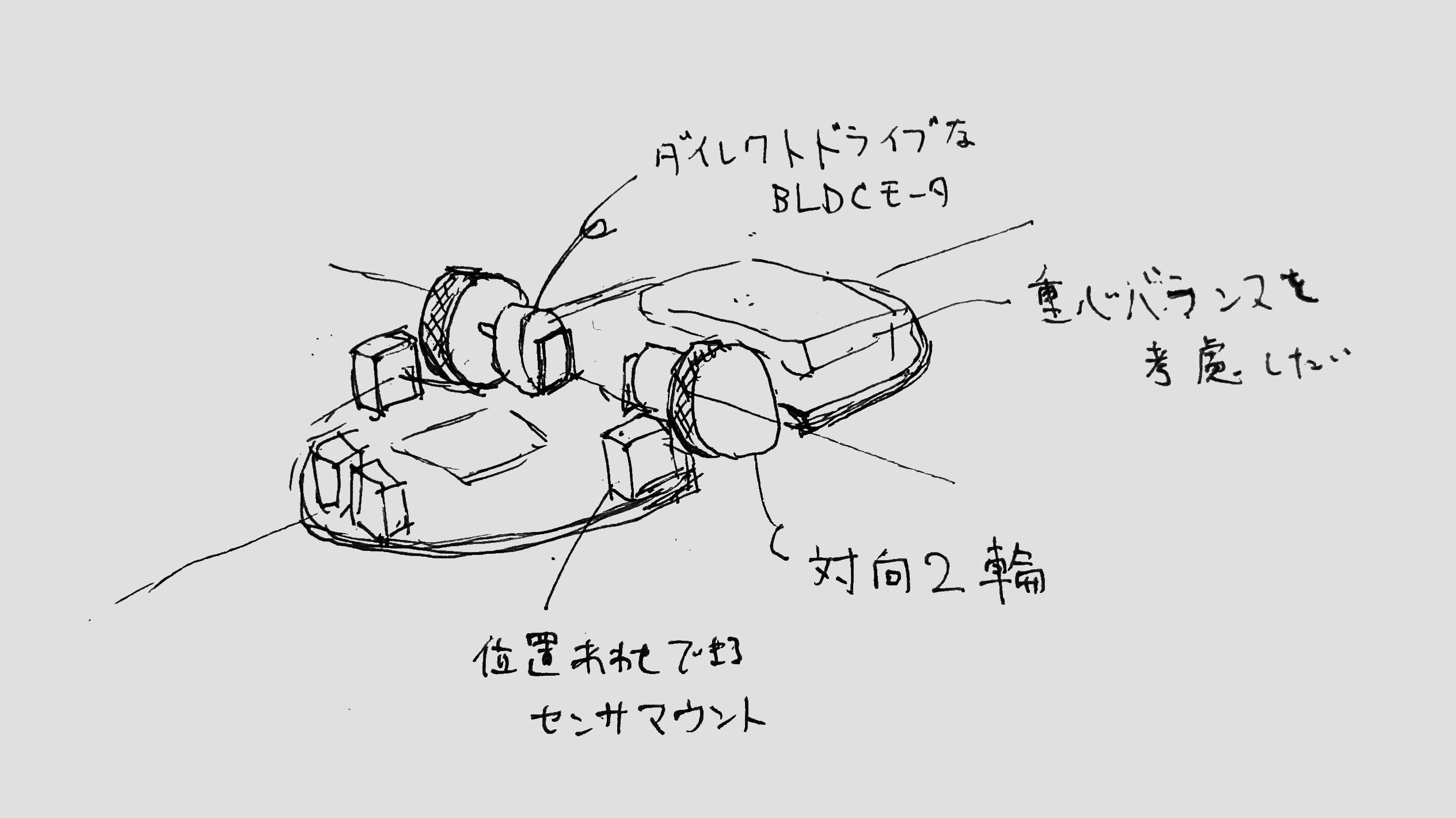
これら3つを考慮して、「ブラシレスモータを用いたダイレクトドライブのマイクロマウス」をコンセプトに作っていきたいと思います。
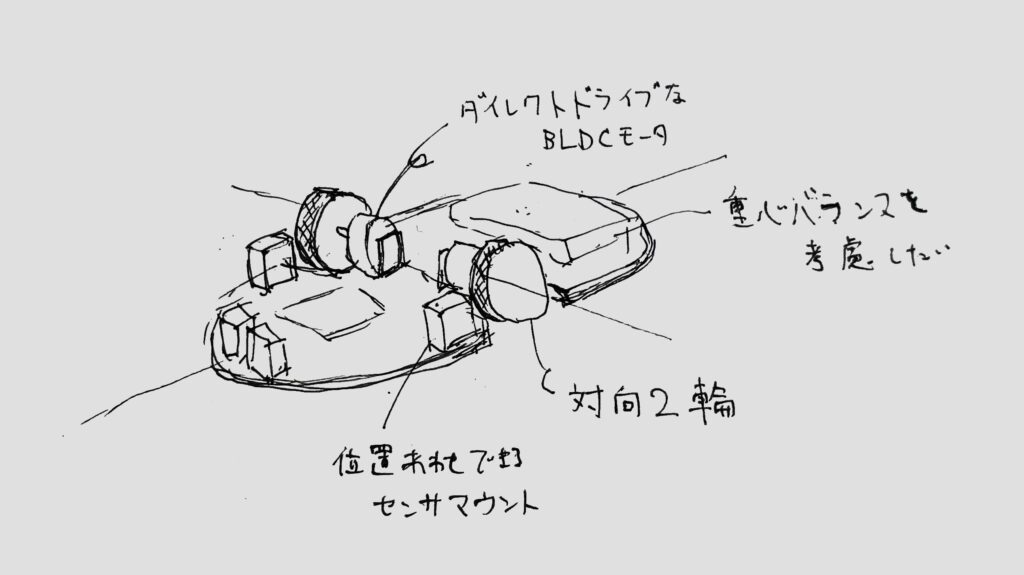
1に関してはダイレクトドライブとすることで、そもそもピニオンギアが無くなります。その場合でもホイールとモータ軸の間でスリップが発生する可能性がありますが、ホイールであれば、ピニオンギアよりもサイズが大きいため、対策がしやすいと思っています。
2に関しては、ダイレクトドライブの対向2輪型のロボットとすることで、精度の良いモータのトルク情報も用いることができるようになるため、いろんな理論が試しやすくなると思っています。
3に関して、近年のドローンの流行やQuasi-Direct Driveと呼ばれる1?10程度の減速比のアクチュエータを用いた脚ロボットやアームロボットの登場により、トルクの大きいアウターロータ型のブラシレスモータがロボットに用いられる機会が増えてきています。マイクロマウスでも走行用モータとしての使用例は少ないですが、吸引用モータに使用されている方は多くいらっしゃるようです。この点でブラシレスモータの制御技術に研修を通してキャッチアップしていきたいと思っています。
今回で大まかなコンセプトを決定したので、次回以降は、本当にダイレクトドライブのブラシレスモータでマウスが走るのか…、モータや駆動用ICの選定について書いていこうと思います。
それではまた。