
各種機能の確認と迷路走行に向けた準備
みなさんこんにちは! YUUKIです。
前回、紆余曲折ありながら組み立てが完了し、いよいよ迷路を走らせていくための準備に入る段階で終わっていました。今回はその続きです。
動作確認
Pi:Coのマニュアルには組み立て完了後、動作確認を含め各種機能を動かすことができるサンプルプログラムとその解説が同梱されています。
それをもとに以下の項目をテストします。
・LED点灯
・ブザー
・スイッチ
・モード選択
・センサーの値確認
・モーター回す
ざっくりわけるとこのような感じでしょうか。
この後迷路走破を目指すようになります。
このようにLEDを点滅させたりします。
一連のサンプルプログラムを動かし、ちゃんと動作することを確認したので迷路を走らせるためのPi:Coのセッティングをしていきます。
そのまえに…
今回走行する迷路がこちらです!
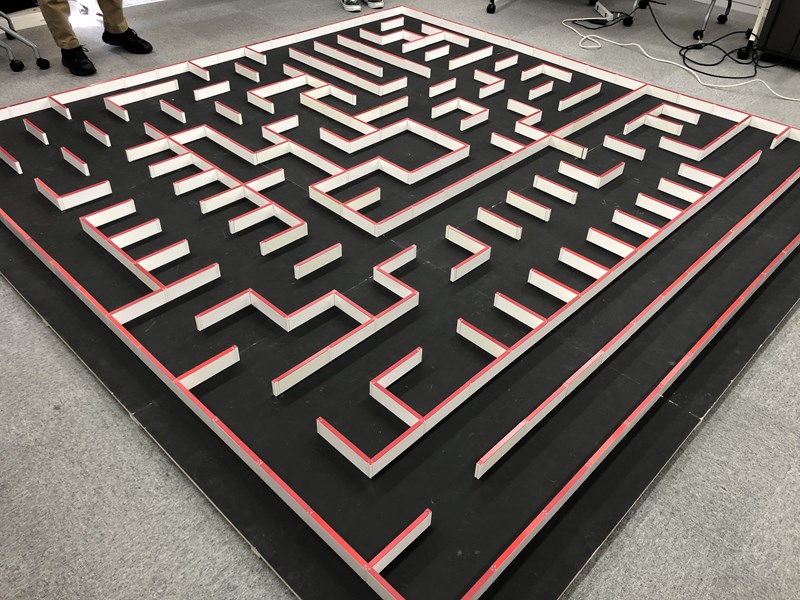 16×16の迷路です。いつぞやの大会と同じコースらしいです。
16×16の迷路です。いつぞやの大会と同じコースらしいです。
迷路を走らせるためのセッティング(機体調整)
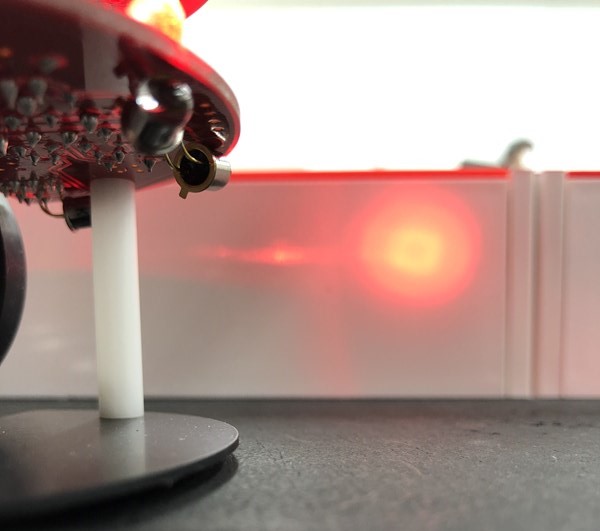
Pi:Coを迷路で走らせるためには、直進、回転をきれいに行うためのパラメーター設定をしていきます。前方についている赤色LEDの照射位置を調整し、それらに合うようにフォトトランジスタも調整します。その後迷路の各位置に機体を置いてTera Termで値を確認し入力していきます。
最初のLEDとフォトトランジスタの位置が合っていない、もしくはパラメーターの値がズレているとまっすぐ走らなかったり、見えない壁を認識したりしてしまいます。
 ?センサー調整中?
?センサー調整中?
直進、旋回等調整を繰り返しゴールを目指し探索していきます。
左手法、トレモー法、求心法と様々な手法がありますが、Pi:Coのサンプルプログラムには左手法と足立法のプログラムが書かれています。ということで左手法である程度ちゃんと探索ができると確認出来たら足立法のコードを少し書き換えてスラローム走行を目指しました。
苦戦を強いられた完走
ここまでさらりと書いていますが、
何となくここはこういうことをやっているんだろう…
・・・???
という表現がよく似合う思考のまま、マニュアルと睨めっこに加え、一から丁寧に教えていただきながら少しずつ進めていきます。しかし、このPi:Coの研修期間として与えられた時間は4日間。そのうち2日間は組み立てと動作確認に費やしていたので実質迷路完走に向け与えられた時間は2日間でした。
そのほとんどをコードと睨めっこに使っていた私は、このあたりから焦り始めます。
スラローム走行にて完走! が主要命題で普通に探索してゴールではクリアとは言えない。
事前の講習でスラローム走行するために「信地旋回」「等速円運動」「台形駆動」と教えてもらい、様々な旋回方法があることがわかりました。
最初は等速円運動を目指していたのですが、完全に行き詰りパニック寸前。時間もない…
マニュアルを見渡していたら信地旋回のほうがもしかしたら何とかなるかもしれない…
ということで急遽勝手に方向転換。信地旋回での完走を目指し始めます。
信地旋回は片方の車輪だけを止め、もう片方を回し旋回する方法です。
侵入と旋回後の立ち上がりをstraight関数で調整し、スラローム時はrotate関数の部分を少し書き換え、とりあえずスラローム走行することがわかったら、侵入と旋回時の加減の値を直接入力して試走を繰り返し、きれいに旋回するまで煮詰めていきます。
 侵入から旋回するタイミング(これだと曲がりすぎ)等を調整しては試走を繰り返しました。
侵入から旋回するタイミング(これだと曲がりすぎ)等を調整しては試走を繰り返しました。
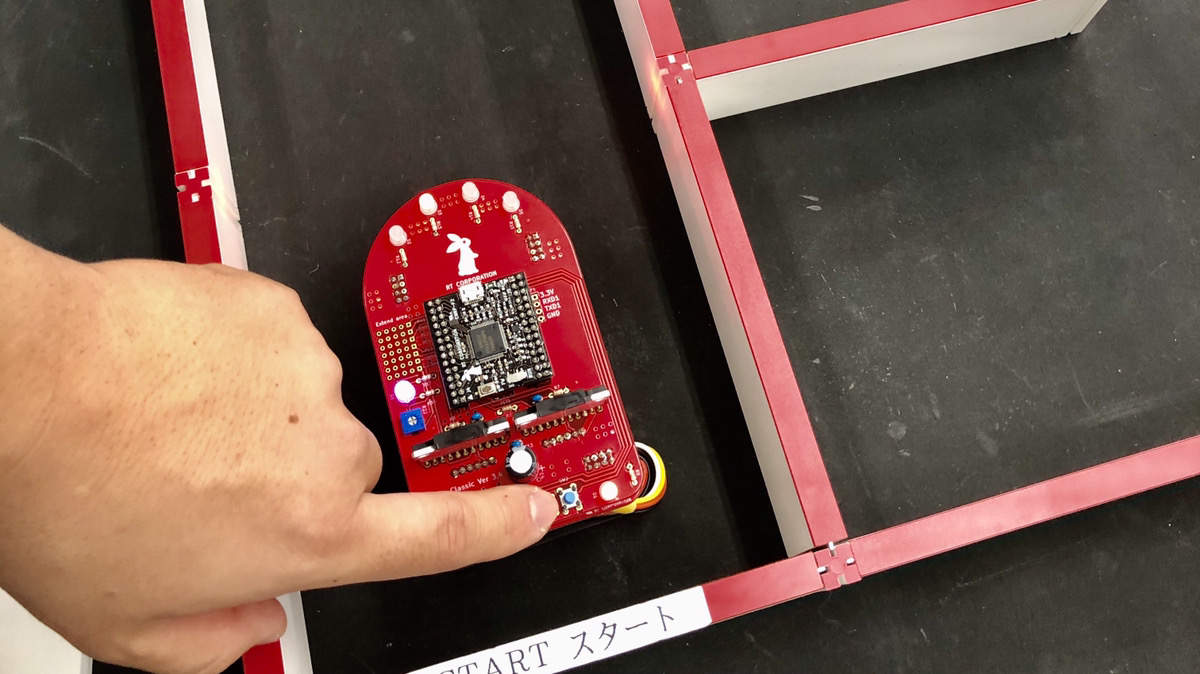
コースの材質が木材ということもあり設置する場所によっては段差ができタイヤが空転してバランスを崩すこともあったので画像のように手で押さえて段差を抑えたりもしました。完走に向けて周りの皆さんにも協力していただきました。
紆余曲折あり、何度も調整を繰り返し研修最終日の終了1時間前あたりでようやく完走しました!
最後にやっと山越えた達成感と不安からの解放に変な声が出ておりますが…笑
調整して走らせてる自分も、周りでみている皆さんも「がんばれ?」と言ってるこの雰囲気は非常にいい時間でありました。
まとめ
4日間に渡るPi:Coもなんとかクリアしました。皆さんの協力により初心者の自分でもなんとかなりました。ロボットを触る。見守るっていうこの感じはとても楽しかったです。
実は、研修終了からブログを書いている時間がかなり空いているので、この間に別の機体(HMキット)を触っていたりします。HMキットのマイクロマウスは旧ハーフサイズと呼ばれるもので、クラシックマウスに分類させるPi:Coより小さいものでした。
これらをもとに、YUUKIの自作マウスへの扉が開かれるわけです。
どんなマウスにするか、構成や演出も自由ということでいろいろ考えています。それと同時にできるようにならないといけないことも多いというのはPi:Co研修にて痛感したところなのでコツコツ頑張っていきたいと思います。
それではっ
YUUKI