
こんにちは、しゅうです。
いよいよモータを動かしていきます!
今回は、モータを動かすために必要なものやステップを洗い出して
次回以降、実装などを行っていきます。
使用するモータについて
モータには様々な種類がありますが、マイクロマウスにおいては基本的にステッピングモータかDCモータが使われます。Pi:Coを使った研修時はステッピングモータを扱っていたので、今回の自作マウスではDCモータを扱います。
DCモータはステッピングモータに比べて制御が難しくなっています。DCモータの回転数を把握するために、別のセンサを取り付ける必要があります。このセンサはロータリエンコーダと呼ばれています。モータの制御だけでなくセンシングも関わってくるので単純にやることが増えてきますね。
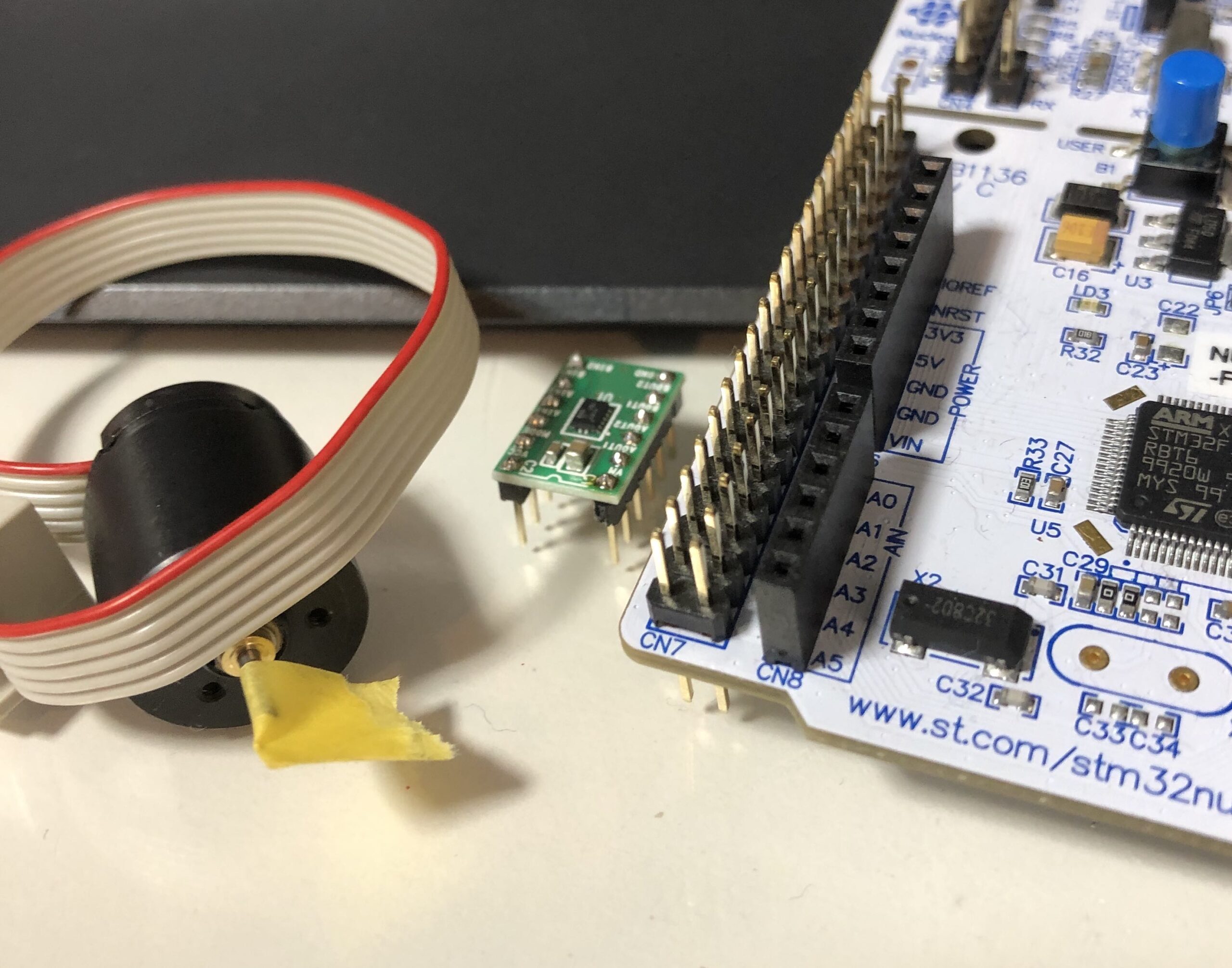
そこで今回は、FAULHABER 1717T003SR-3Vというモータを採用します。こちらのモータはエンコーダがくっついているので別でセンサを用意する必要がありません。

DCモータの動かし方
とりあえず動かすなら、モータの端子に乾電池を繋げれば良いです。ただこれだと電池の電力消費に伴いモータの回転速度が遅くなってきたり、速度の変更ができなかったりします。
そこで、モータドライバICというものを使います。これにより、モータの回転方向・加減速・ブレーキなどより細かい制御を行うことが可能となります。
そのICにPWMという信号を送ります。PWMはPulse Width Modulation(日本語ではパルス幅変調)の略称で、矩形の形をした信号です。そのパルスの幅を変えることでモータ制御を行うことができます。ちなみに、LEDを扱うときにもPWM制御を使うことで、LEDの明るさを制御することができます。
今回はTexas InstrumentsのDRV8835を使います。こちらのモータドライバICは、1つのICで2つのDCモータを制御することが可能ですので、パーツ数もスペースも節約することができます。ひとまず試作用に周辺回路が一体になっているモジュールを購入しました。

PWM制御について
ここでいったんPWM制御についてお話しします。周波数や幅を変更する際、具体的に何がどう変わるのかをお話しします。以下の図において、周期をT、パルス幅をτとしています。また、電圧をHighとLowで表しています。

ここで、DCモータは電圧のかかり具合によって回転速度が変化します。では、なぜHighかLowしかないパルス波で細かい電圧を実現してモータ制御を行うことができるのでしょう?それは、パルス波の1周期において、HighとLowが出ている割合を変えることで擬似的に特定の電圧が出力されます。その割合をデューティ比と呼び、この出力電圧を実効電圧と呼びます。
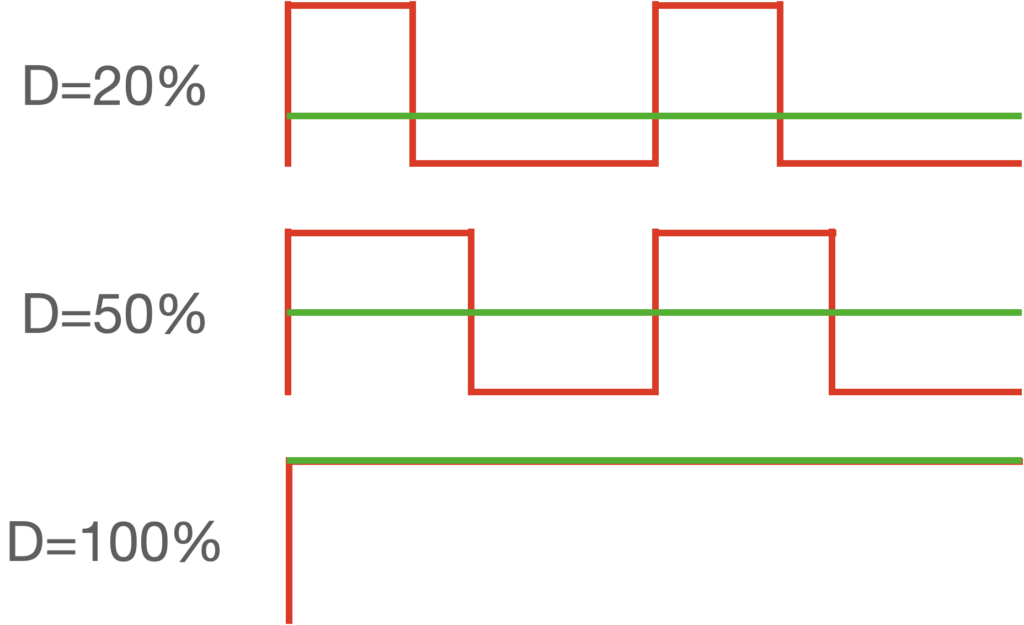
すると、デューティ比をDとした場合、D=τ/Tで計算することができます。その結果、実効電圧はHighとLowの差(3Vと0Vであれば3V)にDを掛けた値となります。D=50%で差が3Vの場合は1.5Vとなります。
ただし、これはモータと接続して初めて実現する電圧です。安定した電圧の実現には、モータの時定数に合わせて周期を決定する必要があります。
デューティ比を変えたときの様子を次の図で示します。このPWM制御によって、入力電圧を変えずにDCモータを制御することができます。
まとめ
以上、モータを動かすための下準備を行なったり解説したりしました。
次回はプログラムを書いてモータを動かしてみます!