
こんにちはショウです。前回KiCadに外形データを読み込んだので、今回は部品配置をしていきます。
配置の考え方
部品を配置する際には配線の取り回しを考えながら表面に配置していきます。マイクロマウスでは可能な限り裏面には部品を配置しません。マイクロマウスはルールで迷路内に0.5mmまでの段差が許されているので、走行中に裏面の部品が段差に接触し、部品やランドを外されてしまう可能性があります。
また、電源や、マイコン周りは部品が密集しているため、配線が通しにくいので、ピンの入れ替えや配置の変更をして配線を通しやすくしていきます。この作業は主に次回の配線時に行います。
裏層はベタGNDにする予定のため、配線が可能な限り表層で済ませられるように考えながら部品を配置していきます。
部品配置
すでにおおよその場所が決まっている部品から配置していきます。

Part17の時にこのように大まかな配置をしているので、それに合わせて部品を置いていきます。
エンコーダのパッドだけはモータマウントの場所に依存するので、この時点で配置を確定させます。配置位置はエンコーダ基板をつなぐためのハンダの盛り上がりを避けるために、モータマウントを凹ませているので、モータマウントの底面の線と基板の位置がずれているので、間違えないようにします。(一度間違えました)
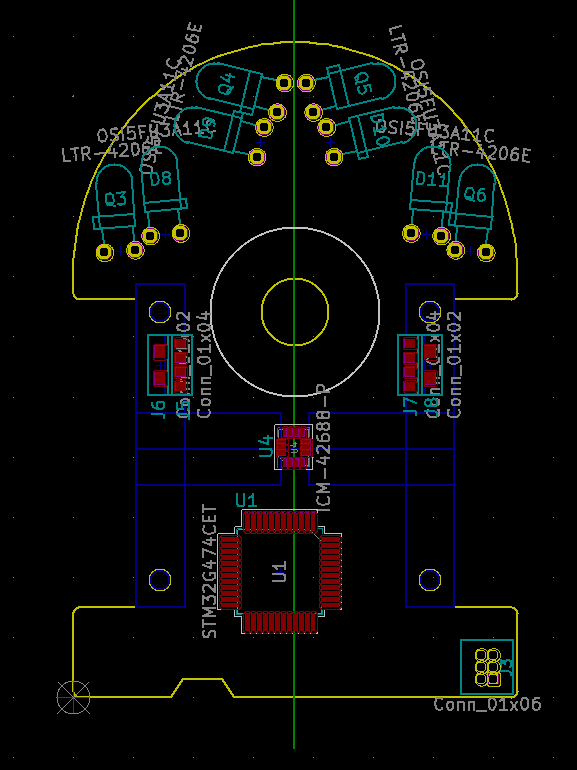
マイコン、IMU、壁センサ、書き込みコネクタを配置していきます。
その中でも位置がほぼ動かせない壁センサやIMUから配置をしていきます。
IMUは回転中心になると予想される、モータの軸線上に設置します。
IMUのような複数の端子に配線を繋げるICの場合は回転させて配線をしやすい向きにしておきます。他の配線をしている間に都合が悪くなった場合は都度調整します。
壁センサは壁に垂直に光を当てず、少し角度をつけて配置します。角度をつける理由に関してはこちらのブログに書いてあります。そのため、フットプリントのプロパティを開いて角度を設定していきます。配置する際にはLEDやフォトトランジスタの正面に他のLEDやフォトトランジスタが来ないように調整して配置します。正面にかかってしまうと壁以外に反応してしまうので壁を認識しにくくなります。
マイコンや書き込みコネクタは周辺の部品によって場所が変わるので一旦適当に置いておき、他の部品との配置で調整していきます。
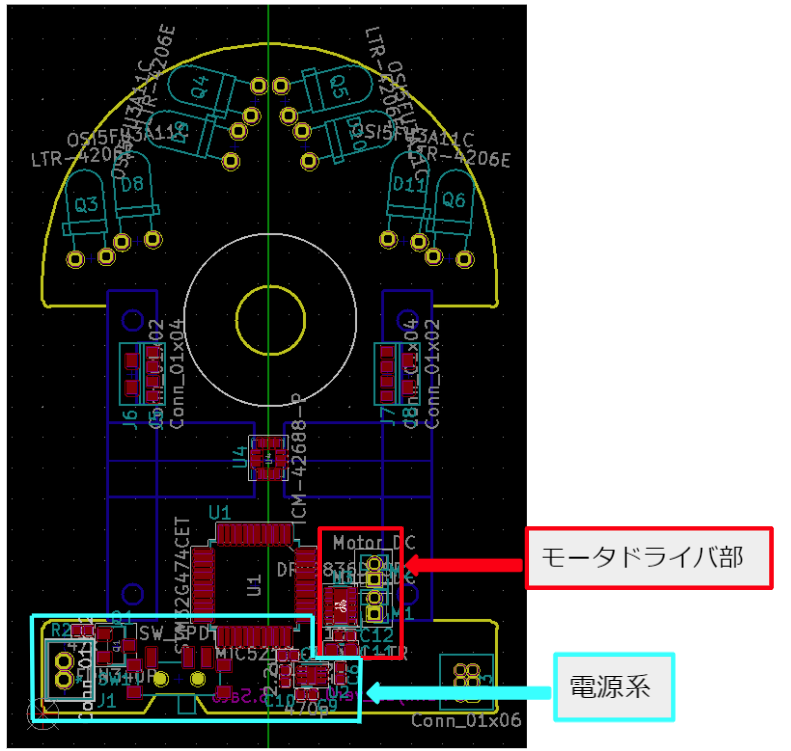
次に電源系を配置していきます。電源コネクタ、スイッチ、レギュレータを配置していきます。スイッチの部分は使いやすいように切り欠きを追加しておきます。
電源系はバッテリーの搭載場所周辺に配置したほうが、長距離を太い配線が通らなくて済むので、スペースがギリギリですが、機体の後方マイコンの後ろに配置しています。その結果、配線の取り回しはあまり良くない配置になっています。
モータドライバなどのモータ系はノイズにもなりやすいため、まとめて配置しています。マイコンのピンをモータドライバのピンと同じ並びにしておくことで、配線がクロスしないようにしています。
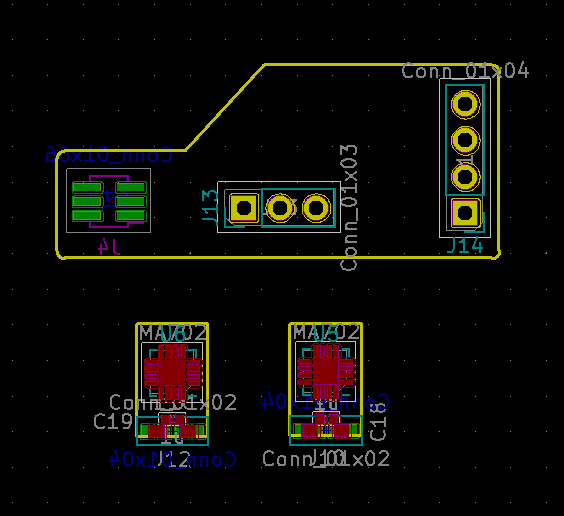
エンコーダと書き込み基板は外側に別の基板外形を作って配置しています。
エンコーダ基板の外形寸法は3DCADで設計したモータマウントの寸法で作ります。
書き込み基板はどのような形状でも構いませんが、メイン基板の書き込みコネクタの近くにモータマウントがあるので、ぶつからないように気をつけて形状を決めていきます。
吸引ファンの部分には部品を配置することができないので、エンコーダのパッドやモータに当たらない範囲で円を書き、ファンの部分を明確にしておきます。
あとはLEDやFET、抵抗、コンデンサをつながっている部品に近くなるように配置していきます。
LEDの配置は壁切れのデバッグ用にも使いたいので、基板の左右に1つずつ配置して、残りはモード選択用に中央に配置しています。
コンデンサはノイズ対策用のパスコンが多いので、ICのすぐ近くに配置していきます。
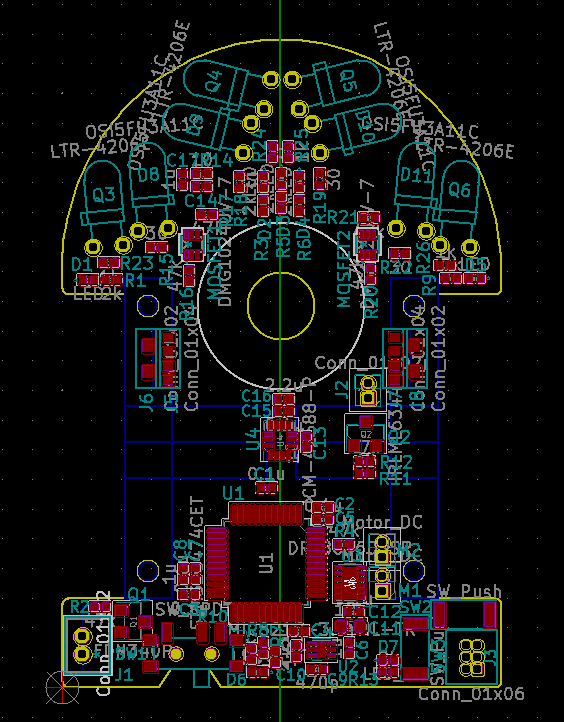
メイン基板の部品配置はこのようになりました。部品は配置できても、配線が通らない場合は次回行う配線の時に部品位置を調整します。
今回はここまで、次回配線をしていきます。