

こんにちは、しゅうです。
新年度が始まってもうこんなに経ってる…!
今回から自作マイクロマウス研修をはじめて行きますが、どういう風に進めて行こうかここのところ悩んでおりました。
そこで制作するマウスのコンセプトから整理していきます。
コンセプト整理
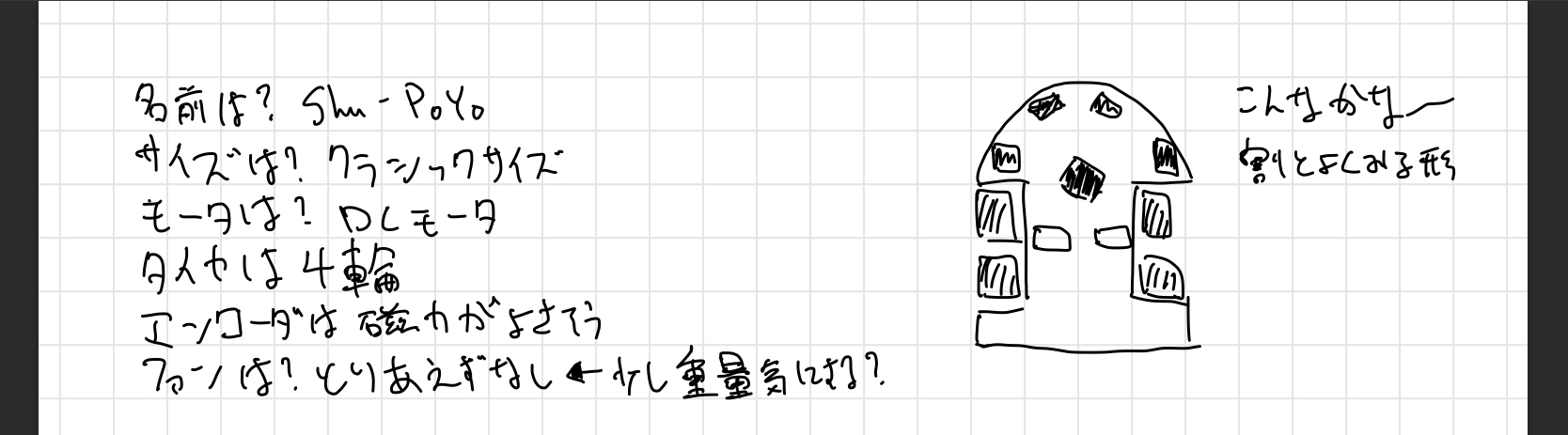
タブレットノートでメモ書き中・・・
概要
今回はほぼ全部オープンにして開発を進めます。
書いていくソースコードや設計図などを以下のGitHubに公開していきます。
現在はライセンス周りを整備中ですので一旦非公開にしてあります。
2021/05/11 ライセンス周りの整理が終わったので公開しました!
まだまだ情報量は少ないですが、今後沢山貯めていけるように努めます♪
https://github.com/shu-rt/shu-poyo
これを機にもっともっとGitに慣れていきたいと思っています!
そしてオープンにする理由としては、今回macOS Catalinaで開発する(したい)ため、なるべくドキュメントを残していきたいなと考えたからです。
他のMacユーザにとって、開発の手助けやヒントになれば嬉しいです。
機体については、斜め走行が可能なサイズになっていたり、充電しながら開発ができたり、走行中にデータを読み取ってデバッグしやすくしたりしたいなと思っています。
後は、今回初めて自作の機体を作るのでなるべくシンプルにしていきたいなと思っています。
マウス上位陣の機体を結構参考にする予定です!
開発環境
現在、僕が使用しているパソコンはMacBook Pro(13-in, 2019)でOSは macOS Catalina 10.15.6です。
個人的には、Big SurはM1プロセッサで使いたいので新しいマシンを買うまでお預けしています。
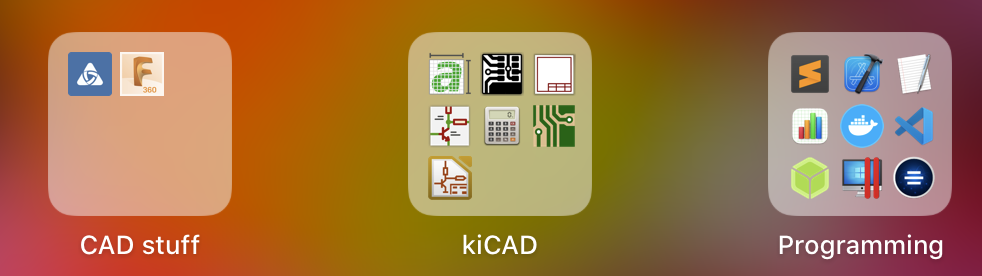
回路設計ソフトのKiCADもメカ設計ソフトのFusionもMac上で問題なく使えるので、回路もメカも順調に設計ができそうです。
エディタは見やすさやブログに載せるときの映え安さ(?)を考えてVS Codeを使っていきます。
コンパイラや使用言語については、使用マイコンに大きく左右されるので
本日以降のブログで詳しくお話ししたいと思います。
マシン
今回自作するマシンは、以下の項目を重視して作りたいと考えています。
- 斜め走行ができる大きさ
- バッテリーを乗せたまま充電が可能
- 実行中のモードが識別しやすい
これをもとに、マシンサイズの決定やマイコンの選定を行っていきます。
まとめ
以上を元に、自作マウスの完成までの長い道のりを歩んでいきます〜!
よろしくお願いいたします♪
次回はマイコンの選定をします。