 二足歩行ロボットキット研修(shota編)
二足歩行ロボットキット研修(shota編) 二足歩行ロボットキット研修(shota編)3 ROBOTIS ENGINEER KIT1 を開封する
二足歩行ロボット研修が始まったのでブログ記事を執筆していきます。今回からROBOTIS ENGINEER KIT1を触り始めます。この記事ではENGINEER KIT1の箱を開封し、その中身を見ます。
 二足歩行ロボットキット研修(shota編)
二足歩行ロボットキット研修(shota編)  二足歩行ロボットキット研修(shota編)
二足歩行ロボットキット研修(shota編) 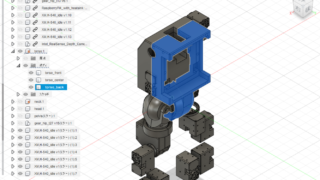 ブログ
ブログ  二足歩行ロボットキット研修(shota編) ブログ
二足歩行ロボットキット研修(shota編) ブログ  二足歩行ロボット研修
二足歩行ロボット研修  ブログ 二足歩行ロボット研修
ブログ 二足歩行ロボット研修  ブログ ブログ
ブログ ブログ