 技術情報・開発日誌
技術情報・開発日誌 CRANE-X7 ROS 2パッケージJazzy版をリリースしました
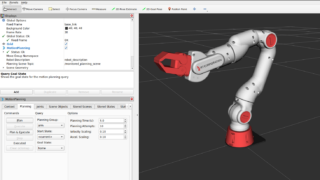
CRANE-X7のROS 2 Jazzy版パッケージをリリースしました。Jazzyへの対応に加えて、moveit_pyサンプルパッケージの追加や、実機を用いずに動作確認が可能なMock componentsにも対応しております。本記事ではJ...
 技術情報・開発日誌
技術情報・開発日誌  CRANE-X7
CRANE-X7  2024年度CRANE-X7開発研修
2024年度CRANE-X7開発研修  2024年度CRANE-X7開発研修
2024年度CRANE-X7開発研修  2024年度CRANE-X7開発研修
2024年度CRANE-X7開発研修  2024年度CRANE-X7開発研修
2024年度CRANE-X7開発研修  2024年度CRANE-X7開発研修
2024年度CRANE-X7開発研修  2024年度CRANE-X7開発研修
2024年度CRANE-X7開発研修  2024年度CRANE-X7開発研修
2024年度CRANE-X7開発研修  2024年度CRANE-X7開発研修
2024年度CRANE-X7開発研修