アールティ製品を使った技術情報や、製品の開発日誌です。
※投稿された時点での情報となり、現在とは異なる場合がございます。
※製品・投稿内容についてのお問合せはコーポレートサイトよりお願いいたします。
連載中
Cで実装する「実践ロボット制御」 (初回:2020/06/18)
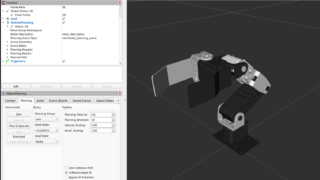
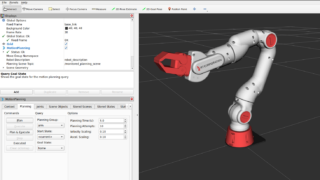
ROS 2でCRANE+V2を動かしてみた (初回:2020/11/11)
HAC入門編 (初回:2022/9/29)
連載終了
CRANE-X7用ハンド開発(四節リンク編) (初回:2019/02/15 最終:2019/05/07)
CRANE開発 (初回:2013/05/20 最終:2013/07/11)