 二足歩行ロボット研修
二足歩行ロボット研修 二足歩行ロボット研修(kora編)[21] Fusion360のモデルからURDFを生成する
こんにちは。koraです。今回はfusion2urdfを使って、ROSで利用するロボットモデルを作成したいと思います。URDF・xacroとはURDFとはUnified Robot Description Formatの略で、ロボットモデル...
 二足歩行ロボット研修 二足歩行ロボット研修 ブログ
二足歩行ロボット研修 二足歩行ロボット研修 ブログ  二足歩行ロボット研修
二足歩行ロボット研修 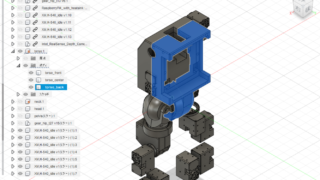 ブログ ブログ
ブログ ブログ  二足歩行ロボット研修
二足歩行ロボット研修  ブログ 二足歩行ロボット研修
ブログ 二足歩行ロボット研修  ブログ
ブログ