

こんにちは!
inukaiです。
前回の記事でシートメタル機能を用いたフレームの設計を紹介しました。
今回は、設計したフレームを図面出力する方法を紹介します。
展開図の図面出力
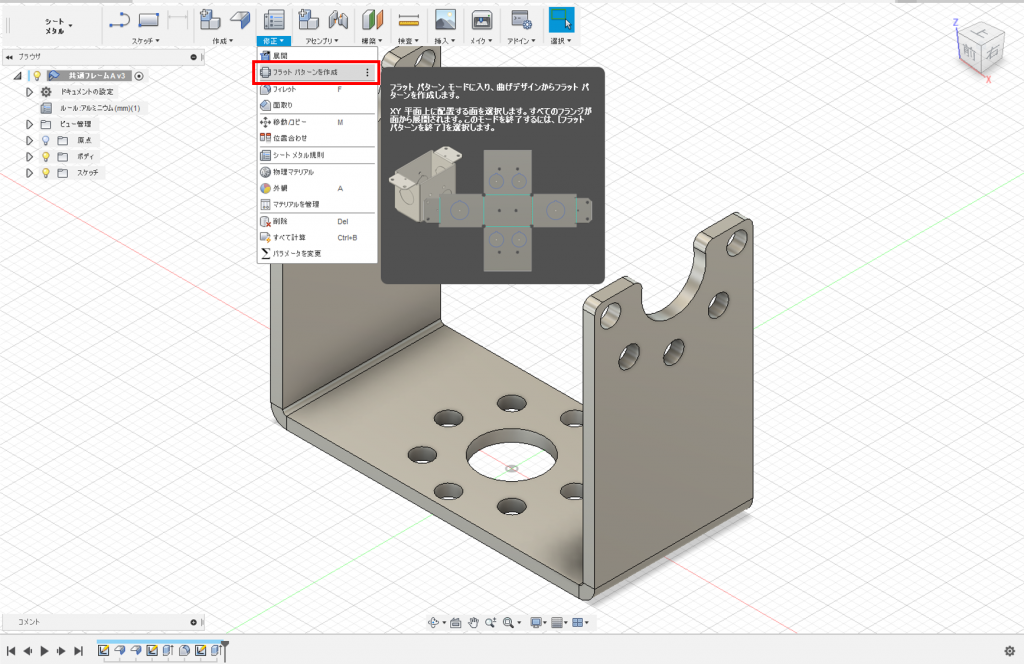
- 部品を展開したものを出力するために、”修正”→”フラットパターンを作成”を選択します。
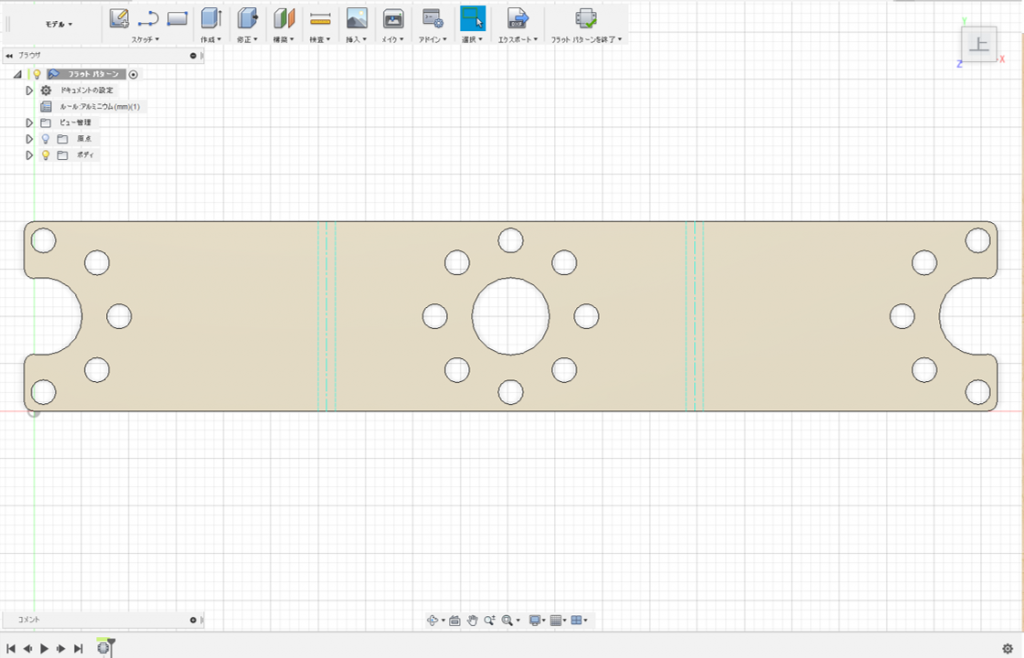
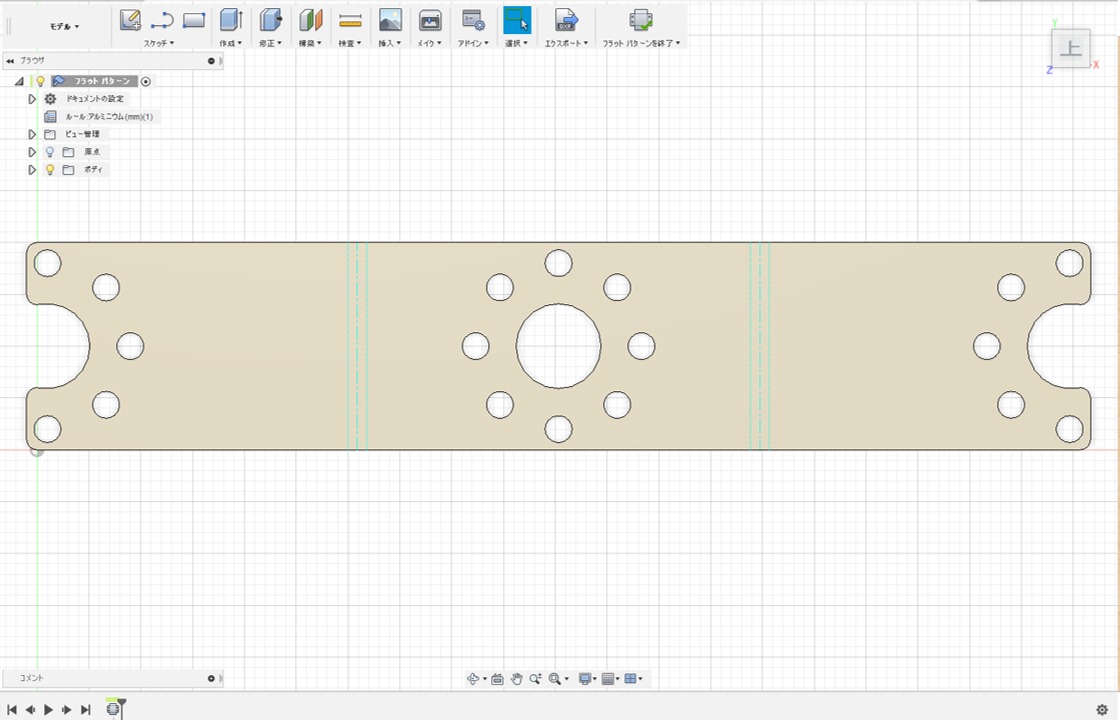
- 下図のようにフラットパターンが生成されます。曲げるための補助線もちゃんと入っていて便利ですね!
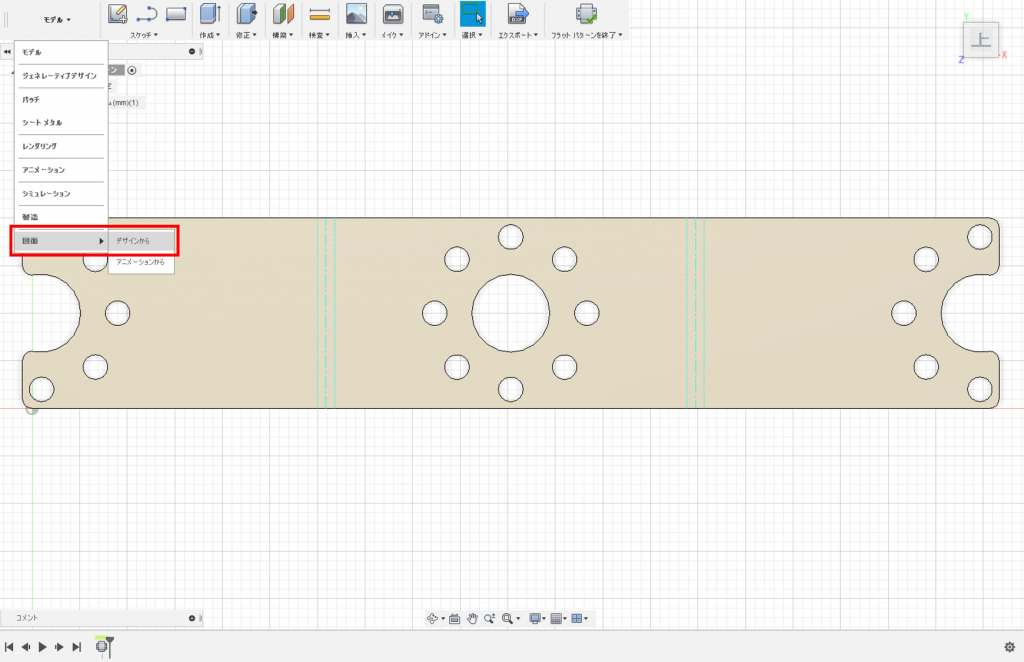
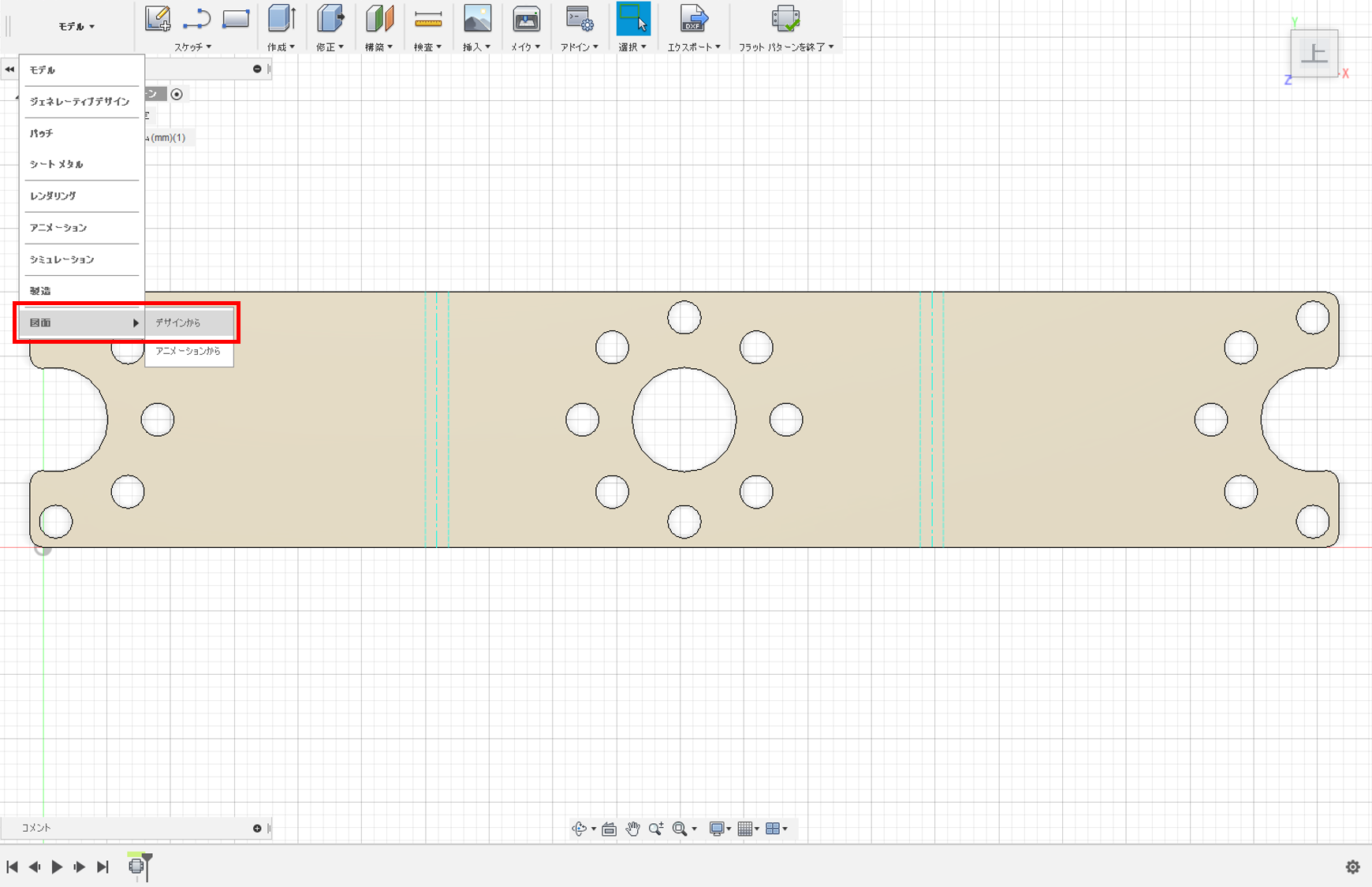
- 右上のメニューから”図面”→”デザインから”を選択。
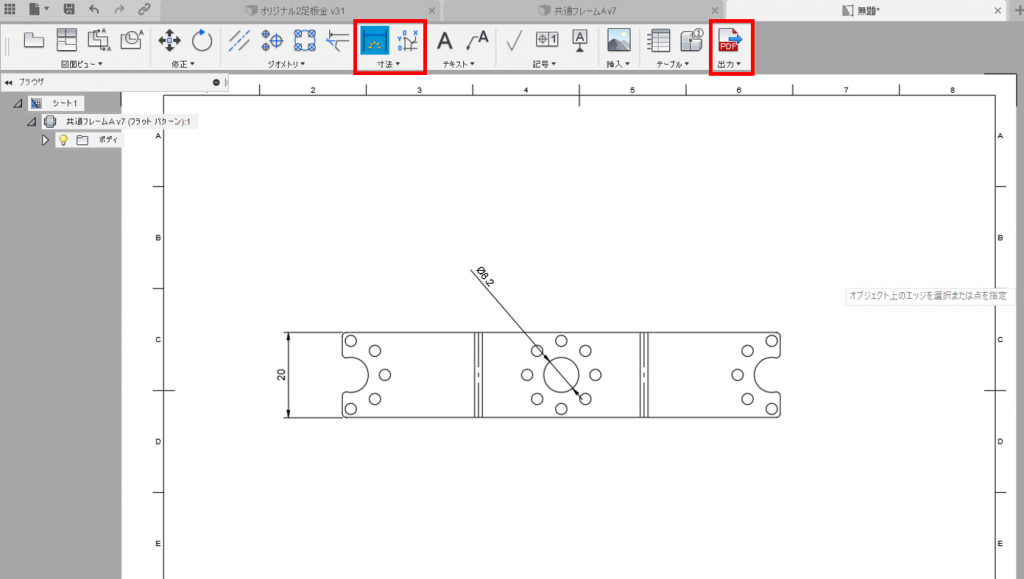
- 図のように展開図の図面が出力されます。
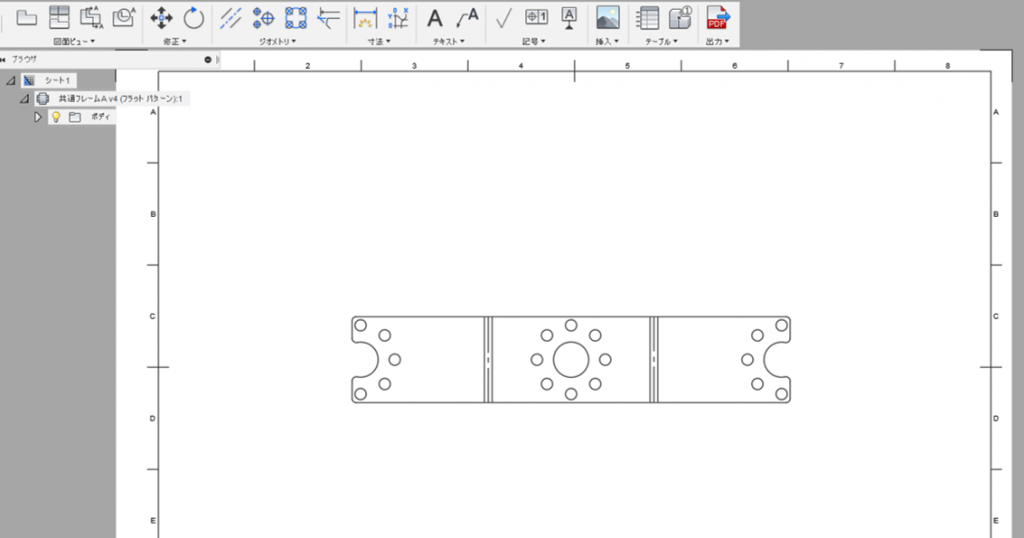
- あとは「寸法」を選択して、図面に必要な寸法を記入すればOKです。
「出力」からPDFファイルなどに出力できます。
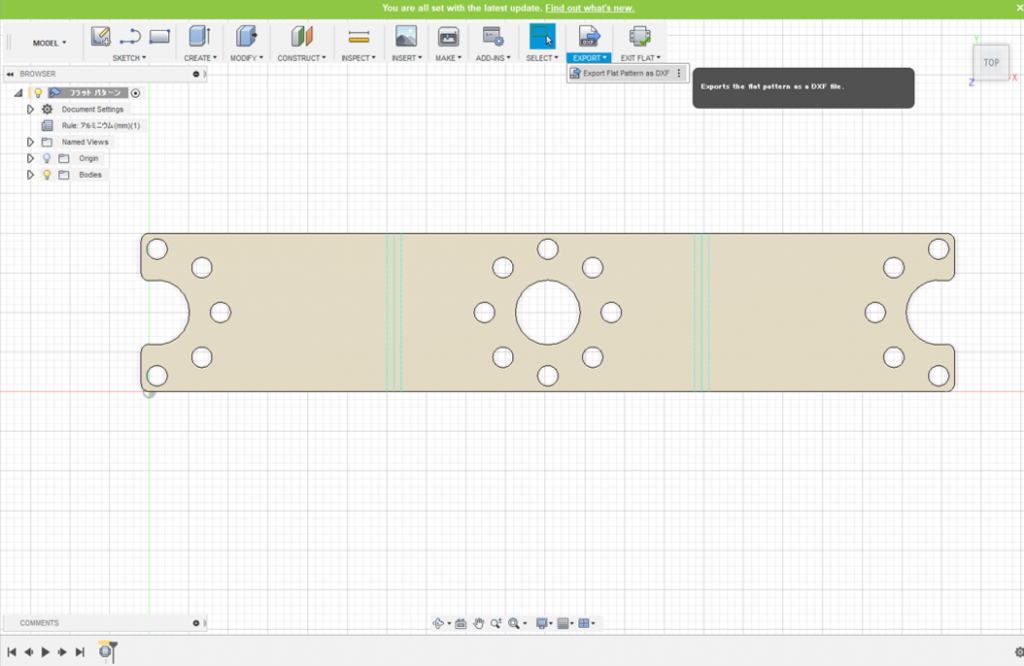
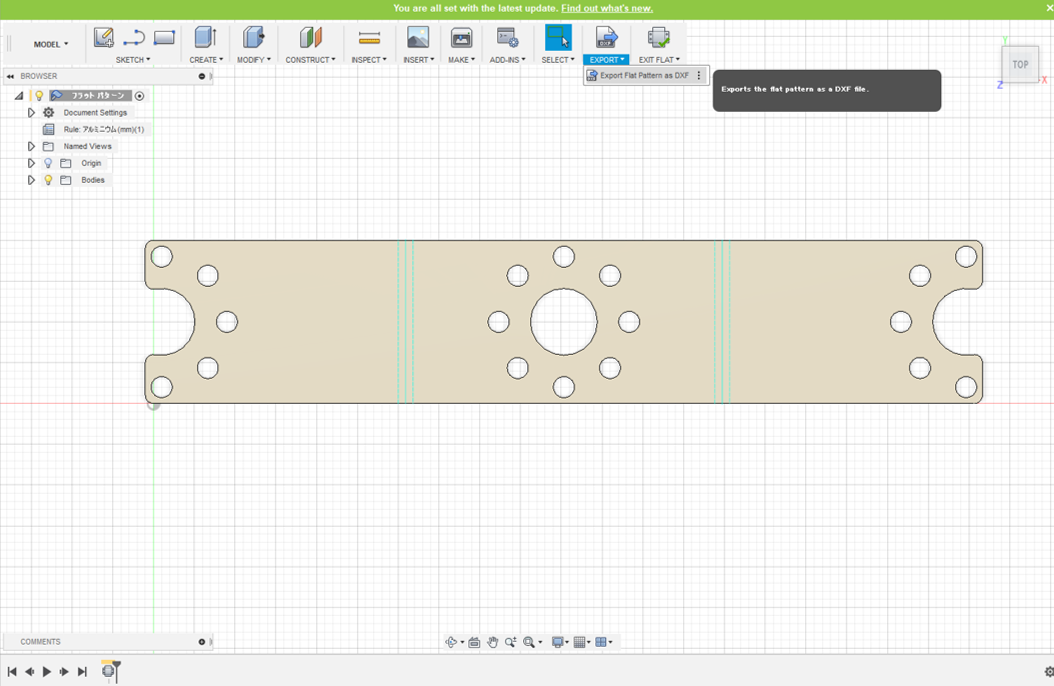
- DXFファイル出力をする場合は、一度言語を英語に変更してfusion 360を開きなおしてください。(2019.04.09時点で日本語環境だと出力されたDXFファイルが壊れていました)
開きなおしたら、2.の画面まで進めたうえで、メニューの「export」→「Export Flat Pattern as DXF」よりDXFファイル出力可能です。



というわけで今回は図面出力方法の紹介でした。
これでDXFファイル出力してNC加工機で削り出したり、PDFファイルで板金屋さんに発注したりできますね。
次回には設計した2足歩行ロボットをお見せできればと思います。
それではまた!

