 2足歩行ロボット研修(inukai編)
2足歩行ロボット研修(inukai編) 2足歩行ロボット研修(inukai編)[10]~ロボット組立!~
前回の記事から期間が空いておりましたが、その間、国際ロボット展の準備等をしていたり、二足研修の開発のためにROSの勉強を改めて行っておりました。おかげさまで国際ロボット展ではニュースなど様々なメディアに取り上げていただくことができました。印刷したフレームとサーボモータを組み立てましたので、紹介していきます!
 2足歩行ロボット研修(inukai編)
2足歩行ロボット研修(inukai編)  CRANE-X7
CRANE-X7 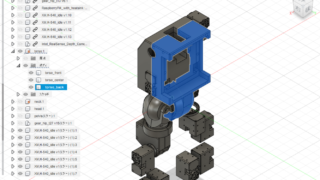 二足歩行ロボット研修
二足歩行ロボット研修  二足歩行ロボット研修 二足歩行ロボット研修
二足歩行ロボット研修 二足歩行ロボット研修  アームロボット研修
アームロボット研修  二足歩行ロボット研修
二足歩行ロボット研修  アームロボット研修 二足歩行ロボット研修 アームロボット研修
アームロボット研修 二足歩行ロボット研修 アームロボット研修