

お久しぶりです!
inukaiです。
前回の記事から期間が空いておりましたが、その間、国際ロボット展の準備等をしていたり、二足研修の開発のためにROSの勉強を改めて行っておりました。
おかげさまで国際ロボット展ではニュースなど様々なメディアに取り上げていただくことができました。
見に来ていただいた方や応援してくださった方々にお礼申し上げます。
(今更感)
前置きはこのへんで研修再開です!
まず前回印刷したフレームとサーボモータを組み立てましたので、紹介していきます!
組み立て
組み立て途中の写真が残ってなかったので、さっそく完成形です!
楽しみにしてたご飯の写真撮ろうと思ってたら、撮影前にもう食べちゃったみたいな感じですね(違

ケーブルの取り回し
胴体内部はケーブルが通るように中空になっています。
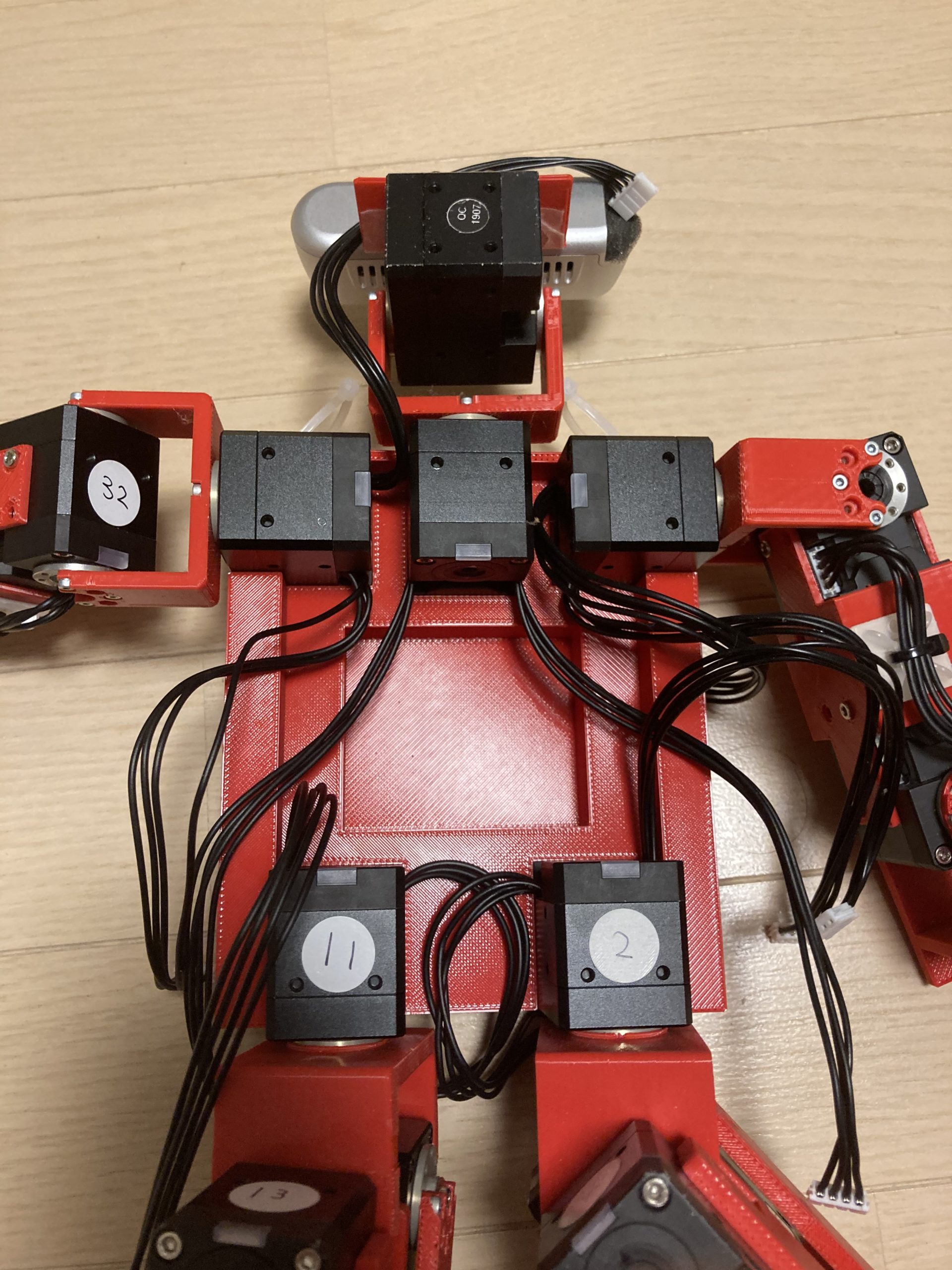
こんな感じで、サーボのケーブルが後ろに引き出されています。

足回りは、マウントベースと結束バンドで、ケーブルを挟まないように束ねています。(左:足全体、右:足首)


電源投入
サーボに電源を入れて、立たせてみました!
サーボに0°を与えた状態で立っており、バランスは悪くなさそうです。

無事に電源が入ったところで、消費電力を図ってみました。
左がサーボに電源を入れただけの状態(無負荷)で、右が立たせた状態です。
20個もサーボモータがあると待機電力も結構大きいですね。


まとめ
設計した機体を組み立て・配線、電源投入を行いました。
直立できているので、バランスもある程度とれて、初の2足ロボット設計としては悪くないできかなと思ってます。
ということで、次回からソフトウェア開発を行っていきたいと思います!
P.S.
バッテリーを乗せるための部分があっさりと壊れました。適宜、細かい修正も含めて設計修正と3Dプリンタで印刷していこうと思います。


