 HAC入門編
HAC入門編 KXR-L2を改造し自律動作可能なロボットを作る:HAC入門編 Part.3
弊社アールティ主催の二足歩行ロボット競技、Humanoid Autonomous Challenge(通称HAC)の参加に向けてロボットを開発しています。アルバイトのtsunoです。今回は、市販のロボット「KXR-L2」でHAC出場を可能に...
 HAC入門編
HAC入門編  HAC入門編
HAC入門編  HAC入門編
HAC入門編  2足歩行ロボット研修(inukai編)
2足歩行ロボット研修(inukai編)  2足歩行ロボット研修(inukai編)
2足歩行ロボット研修(inukai編)  2足歩行ロボット研修(inukai編)
2足歩行ロボット研修(inukai編) 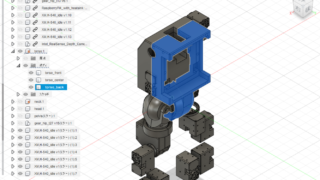 二足歩行ロボット研修
二足歩行ロボット研修  二足歩行ロボット研修
二足歩行ロボット研修  2足歩行ロボット研修(inukai編)
2足歩行ロボット研修(inukai編)  2足歩行ロボット研修(inukai編)
2足歩行ロボット研修(inukai編)