
鍬形です。
アールティが販売するアームロボットCRANE-X7のROS 2パッケージに点群処理のサンプルプログラムを追加しました。RGBDカメラで取得した点群から物体を検出し、掴んで移動させることができます。本記事ではサンプルの詳細や実際の動作についてご紹介します。
CRANE-X7のご紹介
CRANE-X7はアールティが販売しているアームロボットです。7自由度のアームにグリッパを搭載しています。今回ご紹介するROS 2パッケージを使用することでボールを掴んで移動させるといった動作が簡単にプログラミングできます。
また、アールティが公開しているC++ライブラリを用いることで外力に柔軟な制御をすることができます。
詳細な特徴は下記の製品ページをご覧ください。

CRANE-X7は下記の販売ページから購入できます。

今回ご紹介するCRANE-X7 ROS 2パッケージは下記のGitHubリポジトリで配布しています。シミュレータ用パッケージも同梱されているので購入前の参考にも是非ご利用ください。インストール方法はパッケージのREADMEに記載されています。
点群処理サンプル
今回のアップデートで追加した点群処理サンプルについてご紹介します。RGBDカメラが取得した点群から物体の位置を検出し、掴んで移動させることができます。実際の動作については下記動画をご覧ください。また使用方法についてはREADMEをご覧ください。
前回のArUcoマーカを使用したサンプルでは掴む対象にマーカを貼り付ける必要がありましたが、今回は物体の形状から掴む位置を検出するので事前の準備が不要な物体検出方法になっています。異なる手法を実際に動かしてみることでそれぞれの特徴や利点を体験していただけると嬉しいです。
RGBDカメラにはIntel RealSense D435を使用しています。CRANE-X7のハードウェア情報をまとめたリポジトリに公開しているRealSense D435マウンタを使用することで簡単に取り付けることができます。
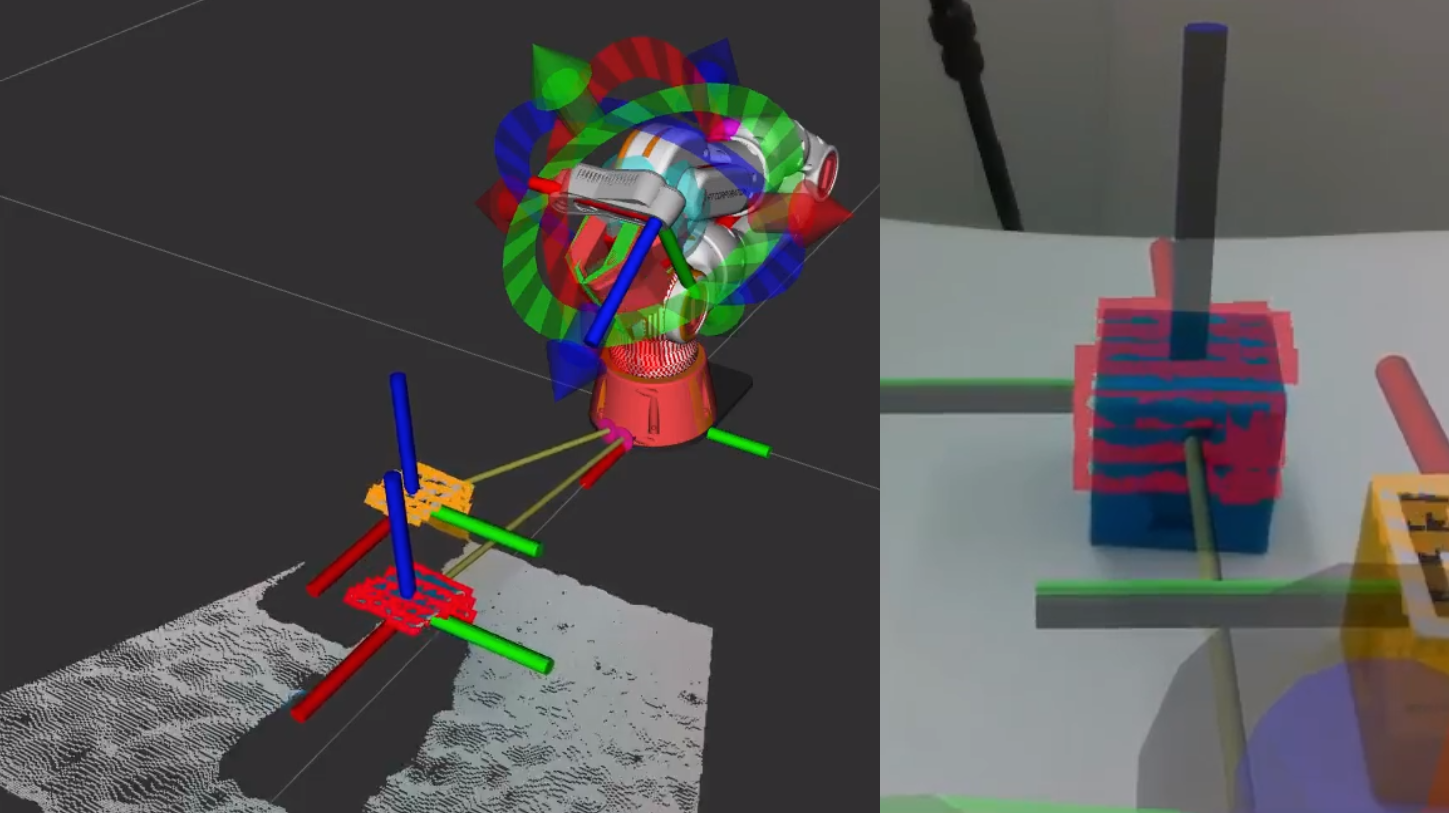
点群処理にはPoint Cloud Library(PCL)を使用しています。k近傍法とよばれるアルゴリズムで点群のおおまかなまとまりを検出し、掴む物体の位置を求めています。検出された点群のまとまりはRVizに色付きで表示されるのでロボットが物体をどう検出したのかわかりやすいです。

まとめ
今回はCRANE-X7 ROS 2パッケージの点群処理サンプルをご紹介しました。カメラを使用したサンプルはもう一つ追加予定なので是非お楽しみにお待ちください!

