 HAC入門編
HAC入門編 Humanoid Autonomous Challengeとは:HAC入門編 Part.1
はじめまして。アルバイトのtsunoです。今回から、弊社が主催するロボット競技会Humanoid Autonomous Challengeに出場することが可能な二足歩行ロボットの開発を行っていきます。筆者は、二足歩行ロボットの格闘競技会であ...
 HAC入門編
HAC入門編  ブログ
ブログ  CRANE-X7 ブログ
CRANE-X7 ブログ  ブログ
ブログ  ししかわの二足ロボ研修
ししかわの二足ロボ研修  ししかわの二足ロボ研修
ししかわの二足ロボ研修  ししかわの二足ロボ研修
ししかわの二足ロボ研修  ブログ
ブログ 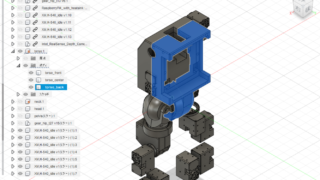 ブログ
ブログ