こんにちはshotaです。
アールティが販売するアームロボットCRANE+ V2のROS 2パッケージを公開しました。
この記事ではCRANE+ V2とROS 2パッケージを紹介します。
CRANE+ V2とは
CRANE+ V2(クラインプラスブイツー)はアールティが販売する、ロボット学習用のアームロボットです。
2015年から販売されているロボットで、学校・企業だけでなく、個人でも購入できます。
過去には、日本ロボット学会のセミナーやROS講習会等で教材用ロボットして使用されたこともあります。


まずはCRANE+ V2の特徴を簡単に紹介します。
製品ページはこちら

ショップページはこちら

CRANE+ V2は卓上サイズのアームロボット
CRANE+ V2はコンパクトなアームロボットです。
腕を伸ばしても30 cmちょっとしかないので、机の上に設置して動かせます。

CRANE+ V2は卓上サイズのアームロボット
アクチュエータとしてROBOTIS社のDynamixel AX-12Aを5つ搭載しています。
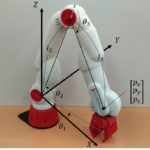
アーム部で4軸、ハンド部で1軸の4自由度構成です。

CRANE+ V2の軸構成
電源・通信モジュールも小さく、USBケーブルでPCに接続して使えるので、手軽に設置して動かせます。

CRANE+ V2の電源・通信モジュール
設置した後はプログラムを作成しないと動かせませんが、サンプルプログラムがあるので心配ありません。
サンプルプログラムですぐに動かせる
購入特典としてLinuxで動くティーチングプログラム(ソースファイル)をダウンロードできます。
実際に動かしてみた動画がこちらです。
ダウンロードできるサンプルはC++で書かれたソースファイルなので、
これを参考にすれば1からプログラミングすることも可能です。
CRANE+ V2のROS 2パッケージを公開しました
購入特典のサンプルはCRANE+ V2のサーボ角度を覚えさせるティーチングプログラムなので、
これを編集して、例えば手先を好きな位置に動かすプログラムを書くのは大変です。(逆運動学問題を解かなければなりません)
このプログラミングを簡単にしてくれるのがROS 2とMoveIt2です。
CRANE+ V2のROS 2パッケージとは
CRANE+ V2のROS 2パッケージcrane_plusはGitHubに公開しています。
このパッケージを使うと、例えばGUIアプリケーションでCRANE+ V2を動かせます。
(ROS 2を使うメリットは他にもあります。)

CRANE+ V2 ROS 2のGUI画面(RViz)
MoveIt2はマニピュレータを簡単に動かすためのオープンソースソフトウェアです。
MoveIt2は逆運動学を解いたり、軌道を計算したりしてくれるので、
手先の位置・姿勢を指定するだけでCRANE+ V2を動かすことが出来ます。
実際に動かしてみた
実際にROS 2とMoveIt2を使ってCRANE+ V2を動かした様子がこちらです。
この動画では、CRANE+ V2 ROS 2パッケージのpick_and_placeサンプルプログラムを実行しています。
手先の位置・姿勢を指示しているだけなので、簡単にプログラミングできます。
まとめ
今回はCRANE+ V2と、CRANE+ V2のROS 2パッケージについて簡単に紹介しました。
具体的なCRANE+ V2の動かし方や、ROS 2パッケージのインストール方法は次回の記事で説明します。