

こんにちは!
inukaiです。
少し期間が空いてしまいましたが、この間の進捗にも作業をしていましたので追って少しずつブログに書いていければと思っています。
以前の記事でおおまかな設計と修正点を挙げました。
今回は修正点を反映しつつ設計変更を行ったため、そこを紹介したいと思います。
- 設計の変更点について
大きな設計の変更点としては、サーボモータを繋ぐフレームを板金から3Dプリント品に変更しました。
3Dプリント品で設計するメリットとしては、設計の自由度が高くなるため部品点数を少なくできる、部品製作が比較的簡単になる、といった点が挙げられます。板金部品のほうが部品の加工精度は高くなりますが、今回はそこまでの精度は必要ないかと考えています。これで、設計→製作→再設計といった作業のペースが速くできるため、実機の開発速度を上げられることが期待できます。
- 前回からの修正点について
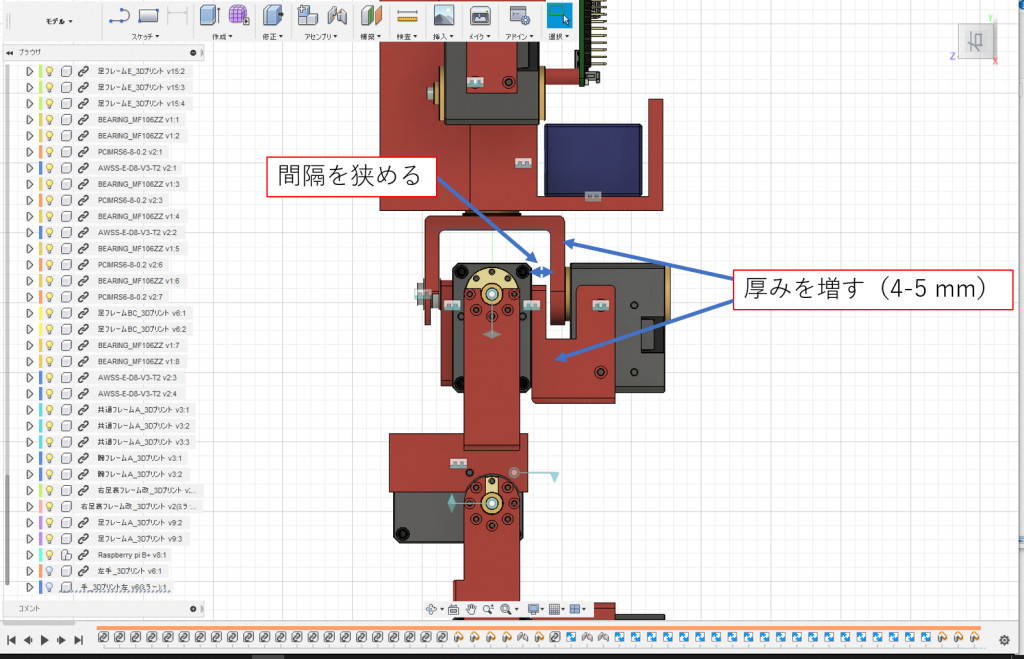
前回の修正点を反映しました。- 足の付け根
まずは足の付け根部分からですが、図のようにフレーム間の間隔を狭めることと、フレーム自体の厚みを全体的に厚くしました。板金の時はフレーム厚を2mmにする予定でしたが、3Dプリント品に代替するにあたり、厚みを増して4-5mmとしました。足回りはフレーム厚を4mmとして、設計に余裕がある部分は5mmとしています。強度に関しては一度足を製作して確認してみる予定です。
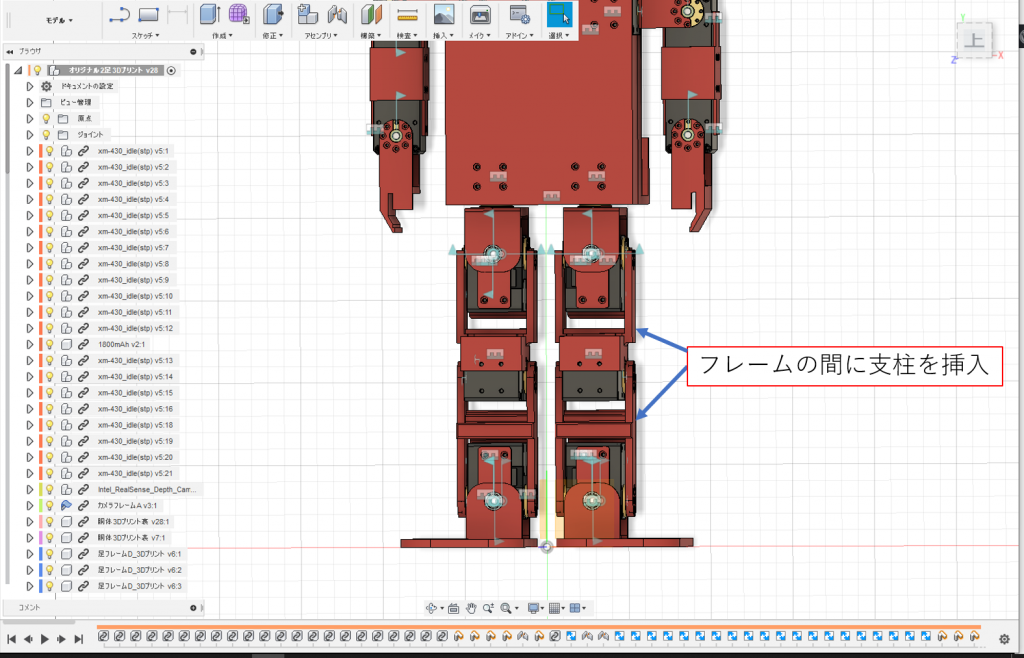
- ひざ周り
ひざ周りの修正については、図のようにサーボモータを左右から押さえて止めているフレームの間に支柱を挿入しました。これによりゆがみに対して強度を高くしました。
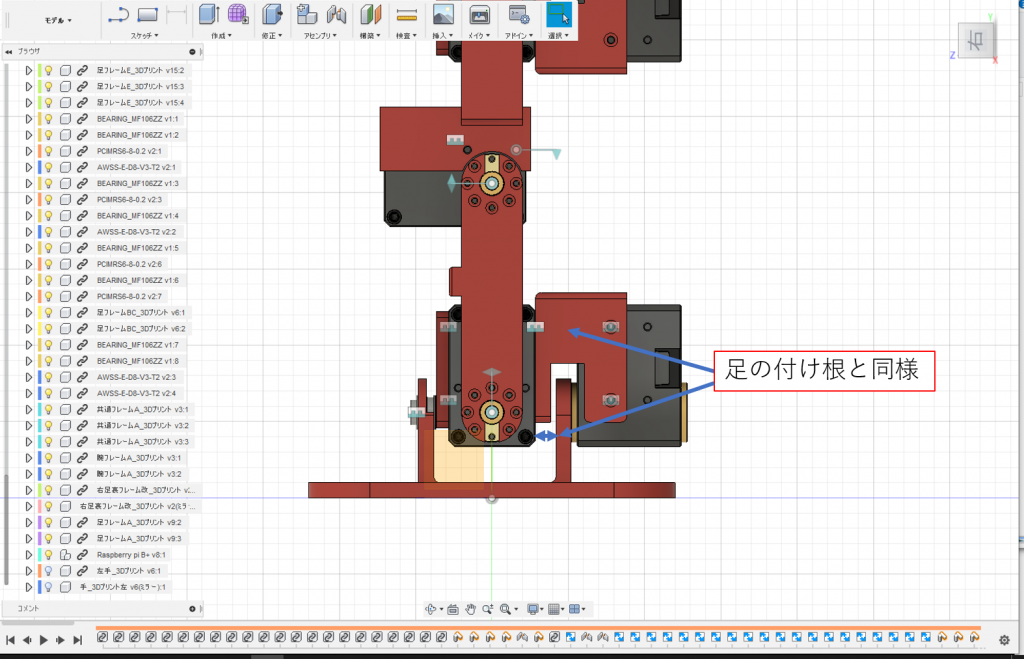
- 足首
こちらは足の付け根と同様です。
- 足の付け根
- その他
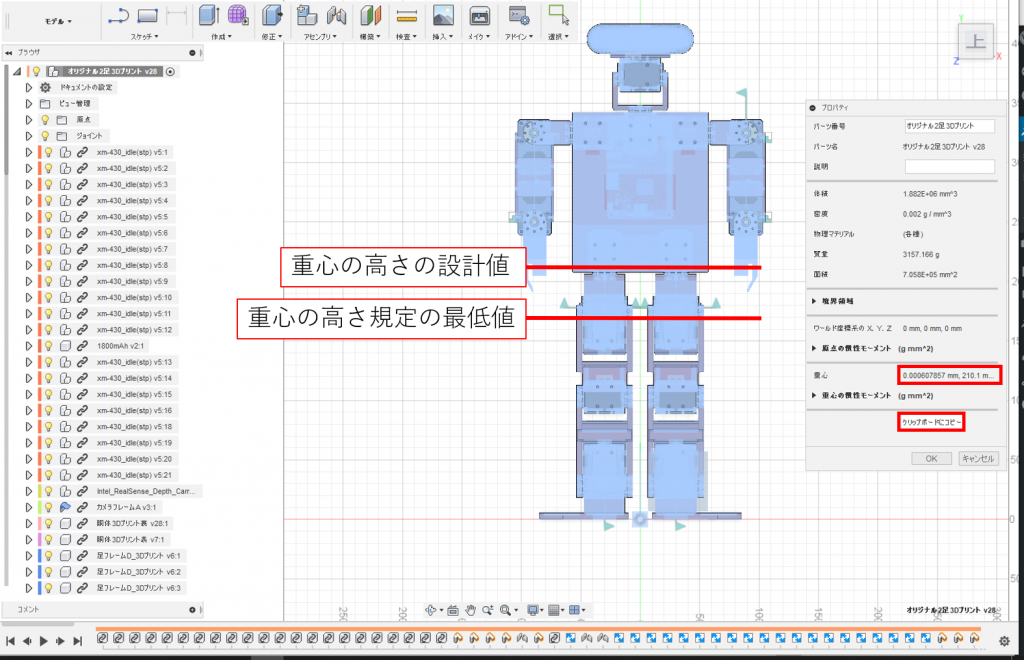
fusion 360で重心計算を行いました。図中の上の線が今回の設計の重心の高さで、下の線が規定の重心の高さの最低の位置になります。図の中で重心の値が見切れていますが、その下のクリップボードにコピーでテキストデータをコピーできます。
設計の構想時に規定を満たせるようなサーボモータの配置にしていましたが、フレームをつけても問題はなさそうです。安定性を考えるともう少し重心を下げてもよさそうですね。




というわけで、設計の修正および変更点を紹介いたしました。時間があれば今後設計の細かい点も紹介していければと思います。
ですがひとまず次回からは早速製作を始めていきます。
ではまた次回!

