
こんにちは。二足歩行ロボット研修中ののshota(@マウス、@ヒューマノイド)です。
今回はROBOTIS ENGINEER KIT1を組み立てます。
組み立てるのは人型ロボットMAX-E1です。
前回の記事はこちら

サーボモータの準備
それでは、説明書を見ながら組み立てます。

ENGINEER KITの説明書
まずはサーボモータにIdlerホーン(アイドラホーン)を取り付けます。

アイドラホーンの取り付け?

アイドラホーンの取り付け?
アイドラホーンはサーボモータのギアと連結してないので、スルスル回ります。
MAX-E1で使うサーボモータ(Dynamixel 2XL430-W250-T)は6個です。
1つのサーボモータに出力が2軸ついてるので、全部で12軸構成のロボットが組み上がります。

アイドラホーンの取り付け?
腕の組み立て
続いて腕を組み立てます。

腕の組み立て?
腕に手を取り付けます。

腕の組み立て?
腕にサーボモータを取り付けます。

腕の組み立て?
サーボモータを取り付けるときは、ホーンのゼロ点(角度がゼロ度になる位置)をチェックします。
写真の切り欠きがゼロ点です。
このゼロ点が真上に来るように位置を整えます。

ホーンのゼロ点が真上に来ているかチェック
ネジを閉めて腕の完成です。

腕の組み立て?
同じように左腕も組み立てます。

腕の組み立て?
腕が完成しました。
腕には2軸しか用意されてないので、前後左右のシンプルな動作しか出来ません。
両腕ではさめば物を持ち上げられそうです。
上半身の組み立て
頭パーツを組み立てます。
画像真ん中の部品は小さいサーボモータのようにも見えますが、ただのプラスチック部品です。
駆動しません。

頭の組み立て?
カッコいい頭パーツを取り付けます。

頭の組み立て?
胸パーツに両腕を取り付けます。

上半身の組み立て?
胸パーツに頭を取り付けます。

上半身の組み立て?
上半身の完成です。
頭が動作しないので、カメラで物体認識する場合は改造が必要かなと思います。
サーボモータを追加したいですね。
腰の組み立て
上半身と下半身を接続する腰パーツを組み立てます。

腰の組み立て?

腰の組み立て?

腰の組み立て?
腰は動きません。固定されています。
脚の平行リンクの組み立て
続いて脚を組み立てます。
まず、サーボモータにリンク接続用の部品を取り付けます。

脚の組み立て?

脚の組み立て
平行リンクを組み立てます。

脚の組み立て?

脚の組み立て?
平行リンクをサーボモータに取り付けます。

脚の組み立て?
脚の並行リンクが完成しました。
平行リンク、平行リンク、と何度も書いてますが、
そもそも平行リンクがどういうものなのかは次回までに調べます。
足の組み立て
足を組み立てます。

足の組み立て?

足の組み立て?
足をサーボモータに取り付けます。

足の組み立て?
足首は横に回転します。

足の組み立て?
脚を本体に取り付けます。

足の組み立て?
身体が完成しました。

身体が完成
ケーブルの配線
サーボモータの通信・電源ケーブルを配線します。
まず、メインコンピュータであるCM-550を取り付けます。

CM-550の取り付け
脚のケーブルを配線します。

ケーブルの配線?

ケーブルの配線?
腕のケーブルを配線します。

ケーブルの配線?
腕の角度によってはケーブルが引っかかるので、腕の回し過ぎに注意です。

ケーブルの配線?
仕上げ
いよいよ最後の作業です。
なぞのプラスチックパーツを取り付けます。
多分飾りです。このパーツが無くても動きますが、、、ロボットってそういうものだと思います。

かっこいい部品の取り付け?

かっこいい部品の取り付け?
バッテリーボックスを取り付けます。

バッテリーボックスの取り付け?
バッテリーボックスの取り付け?
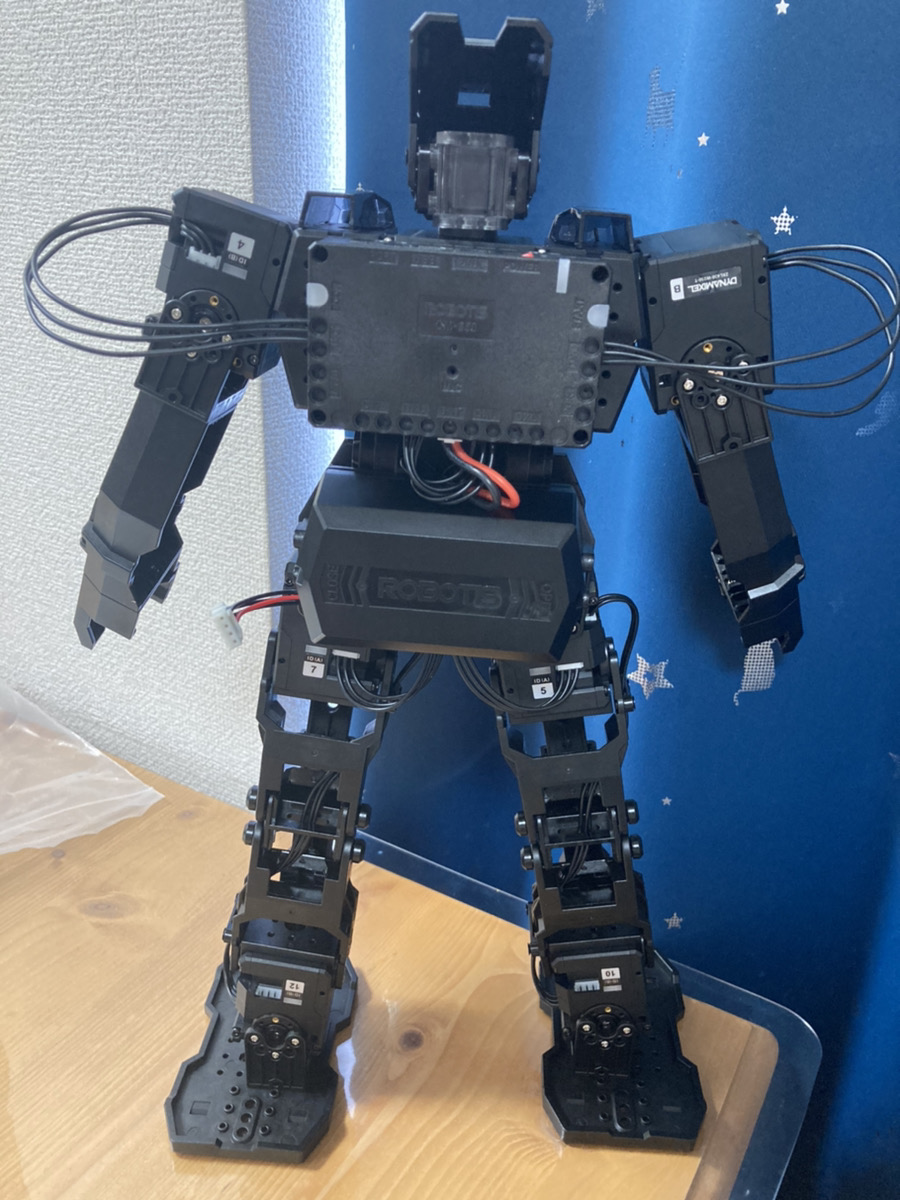
MAX-E1が完成しました。

MAX-E1 完成
まとめ・感想
- マイクロマウスと違い、ものすごい部品量・・・。ネジ無くしそう・・・
- 研修の競技ではカメラで物体を検出するので、首もモータで動かせたほうが便利そう
- 次回までに、平行リンクの特徴について調べます。
次回はMAX-E1をR+ Task 3.0アプリで動かします。
