
9月22日の記事で開催を告知したHumanoid Autonomous Challengeについて、先日9月30日に無事に終えることができました。ご参加、ご来場くださった皆様、ありがとうございました!本記事では、そのレポートをお届けします。
ルール説明と機体ルールチェック
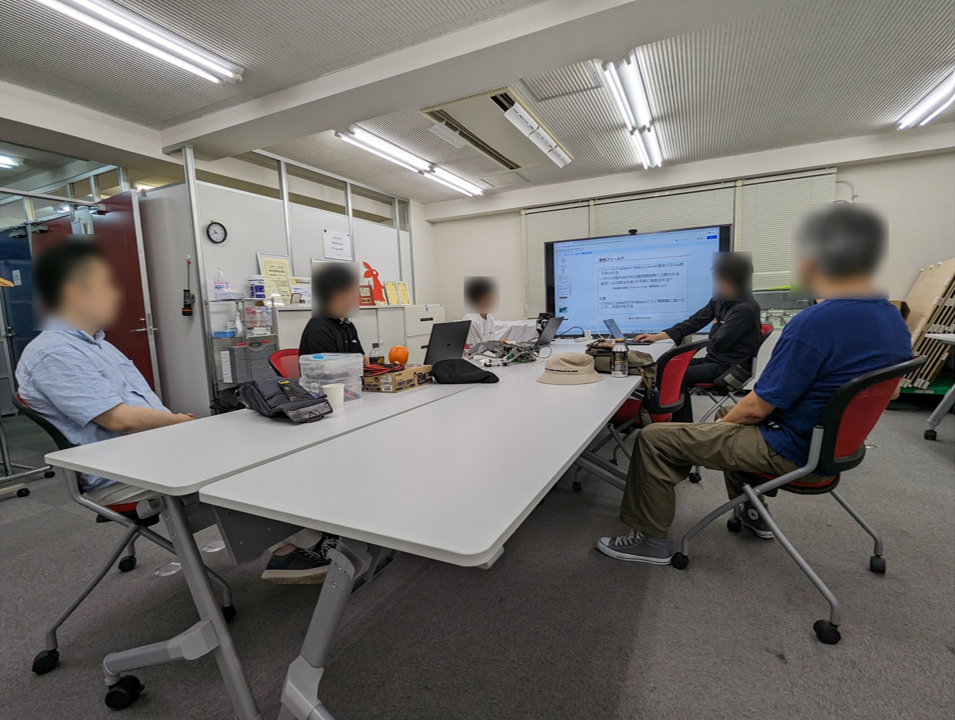
ルール説明の様子
まずは競技ルールの説明と機体ルールチェックから。筆者Tsunoの機体HAC-KXRを題材に、機体ルールのチェック手順を説明を交えながら実施して、問題なくクリアしました。機体ルールは他のヒューマノイド競技といくつか異なる箇所があるので注意が必要です。
フィールド展開

フィールドの展開
次にフィールドを展開しました。HAC競技規則では、フィールド上のボールの数は大会1カ月前に告知されていますが、フィールドを構成する6枚の正方形パネルの組み合わせは競技開始時に告知されます。このあたりはマイクロマウス競技とも近いですね。どんなフィールド形状でも完走できるように機体を製作してこなければなりません。
今回はプレ大会ということもあり、ボールの数は1個、フィールドはパネル6枚を真っすぐ並べた直線形状でした。
競技開始
フィールドの準備が整ったらいよいよ競技開始です。制限時間5分の中で3回の出走が行えます。
HAC-KXR

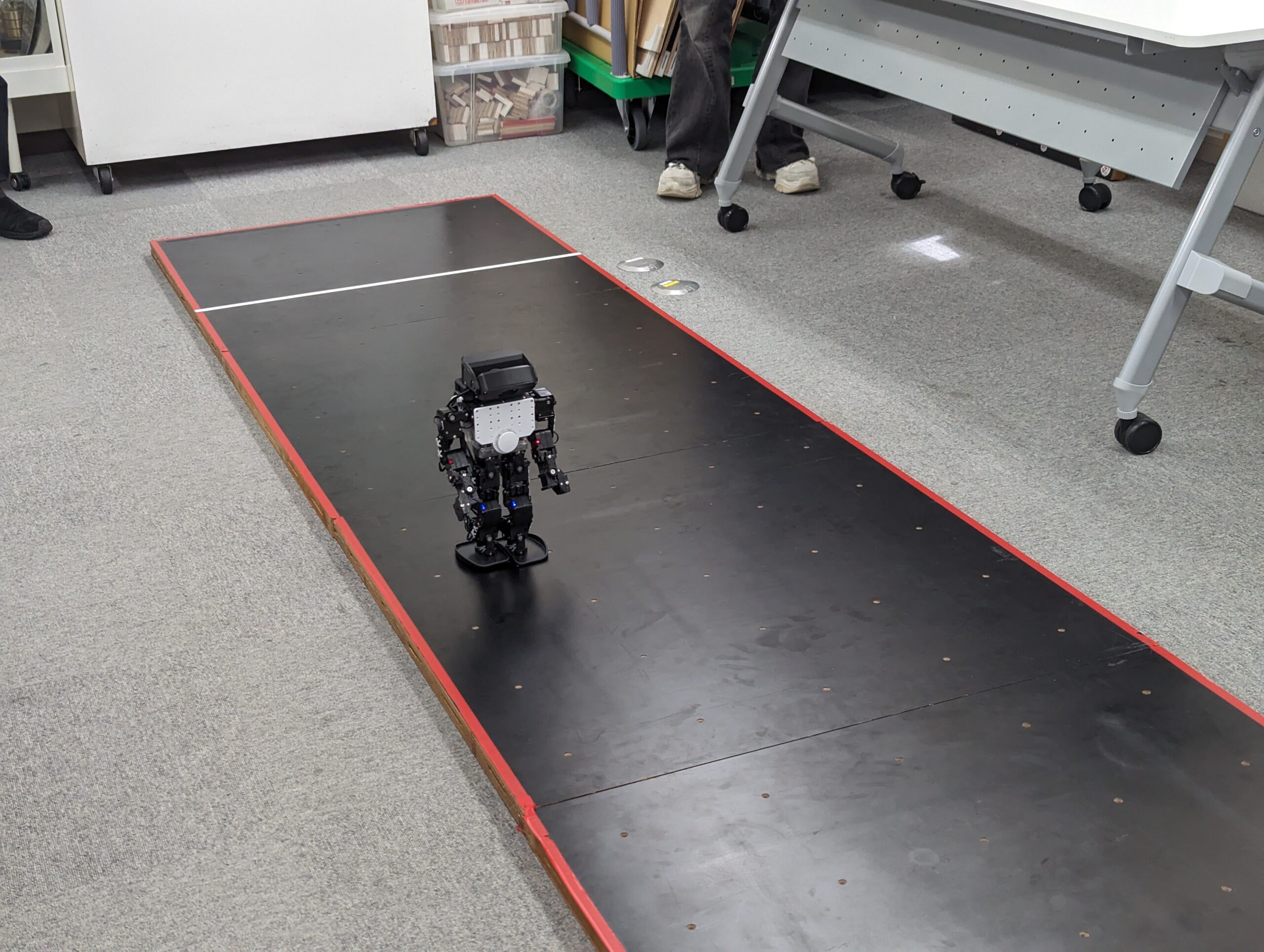
ボールに触るHAC-KXR
私のHAC-KXRは一回目の出走でボールに触ることに成功しましたが、復路でフィールドから落下してしまいました。この時点で制限時間は2分半が経過。二回目の出走では見事完走しましたが、途中で制限時間の5分が過ぎてしまったため惜しくも参考記録(3:06)となってしまいました。制限時間5分は小さいロボットにはかなり厳しいですね。このあたりは本大会までに制限時間のルールに修正が入る可能性があるそうです。
フラン君
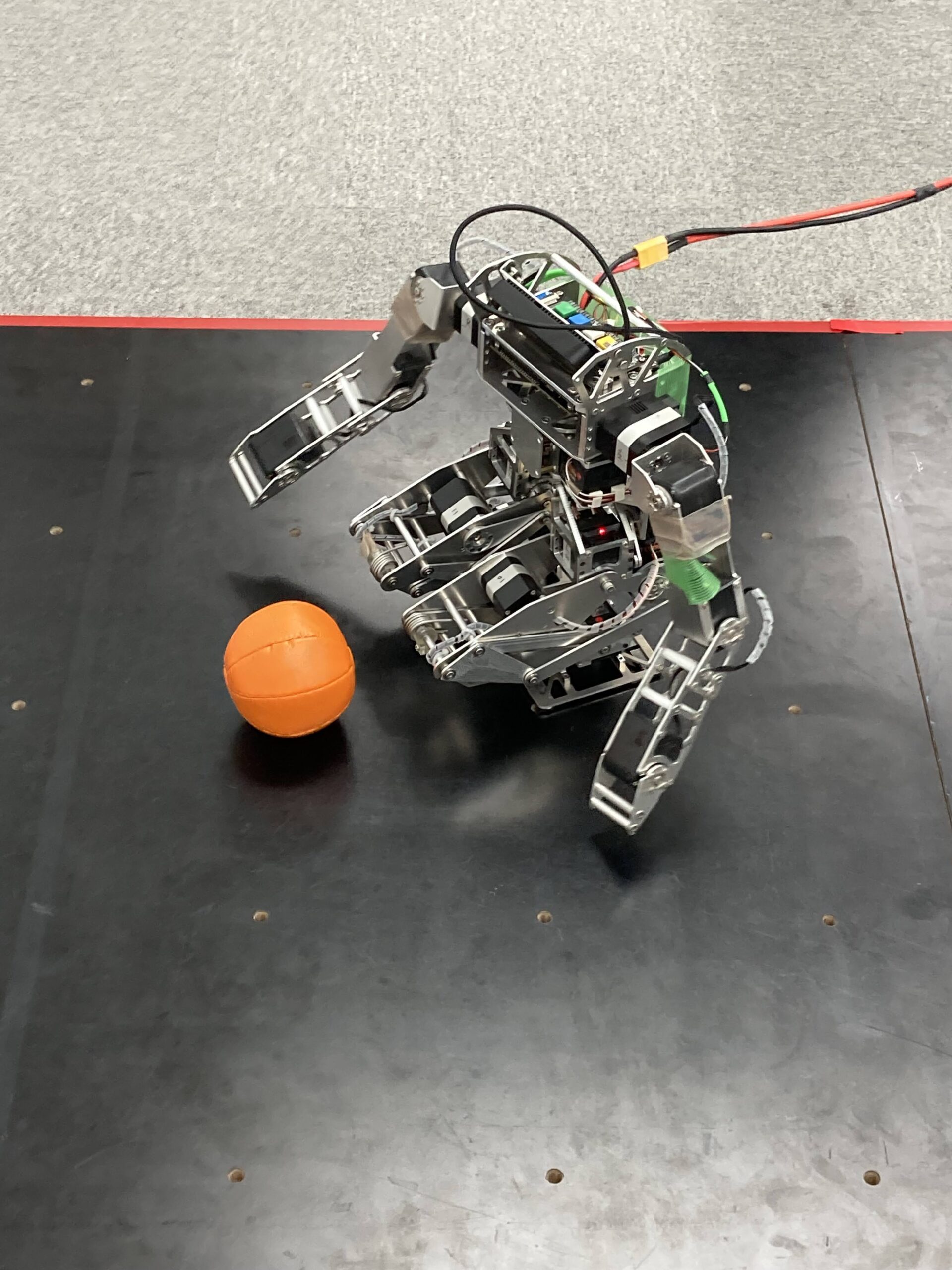
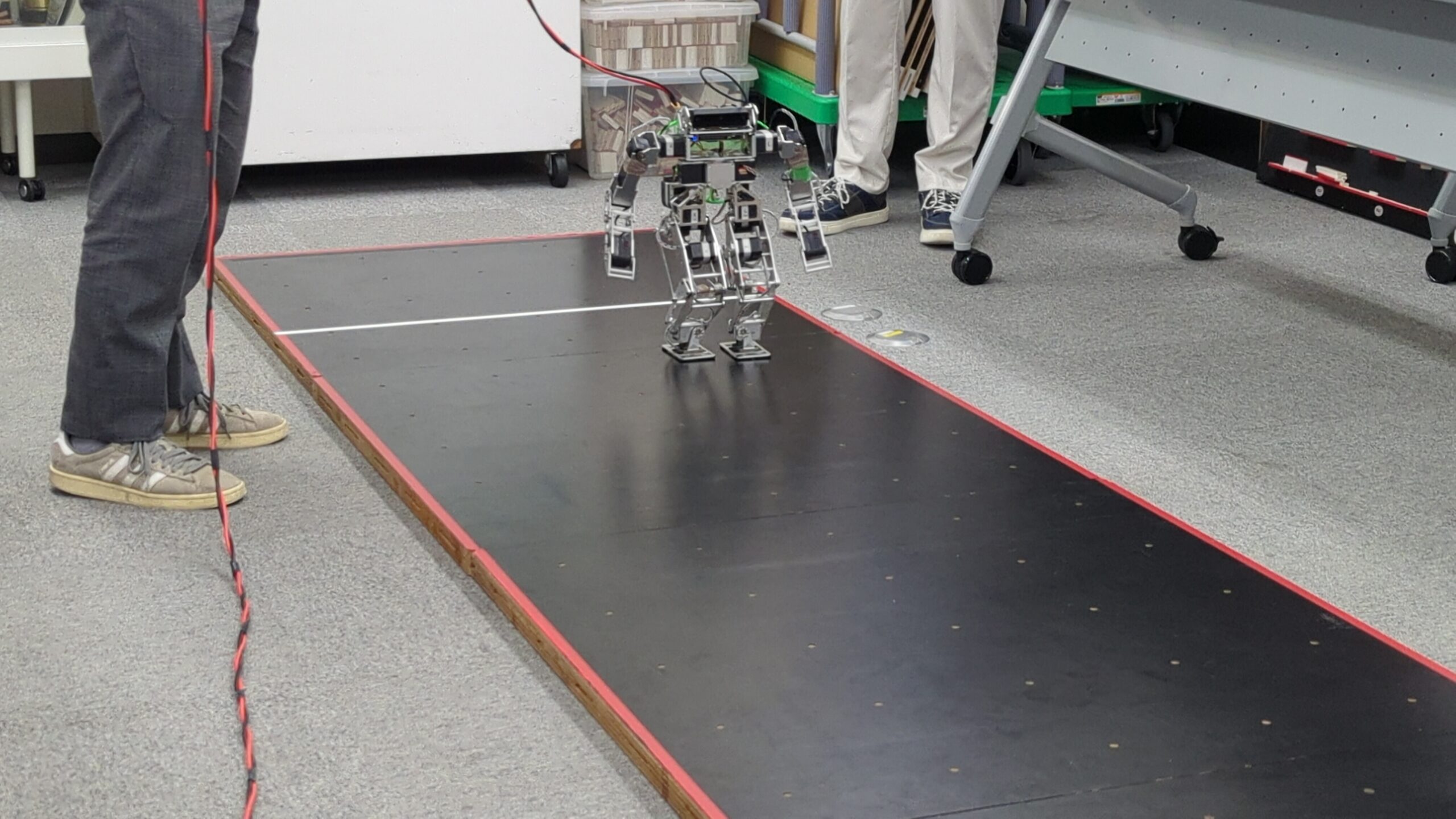
ボールに触るフラン君
次の走者は、ロボット名「フラン君」。開発者の方曰く、フラフラ歩くからこの名前になったとのこと。そんな由来を全く感じさせない綺麗な歩行でボールに向かっていきました。カメラはOAK-Dを使用されているそうです。残念ながら完走とはなりませんでしたが、FPGAを使った安定感のある歩行と画像認識の連携などすでにハイレベルながら、今後どうなっていくかもとても楽しみなロボットでした。次回大会以降もお待ちしています!
以上2機体の試技をもって、HACプレ大会は無事閉幕となりました。
おわりに
さて、今回完走したHAC-KXRのプログラムは、今後GitHubと本ブログで順次公開していきます。さらに、来年3月に開催する第1回HAC本大会に向けて、毎月練習会を開催する予定です。
続報をお待ちください!

