こんにちは、アールティの加藤です。
アールティが販売するアームロボットCRANE+ V2のROS 2パッケージを更新しました。新しいROS 2ディストリビューションであるHumbleに対応しています。本記事ではHumble版パッケージの変更点と簡単な導入方法について紹介します。
CRANE+ V2の紹介
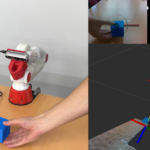
CRANE+ V2はアールティが販売しているアームロボットです。4自由度のアームにグリッパが搭載されています。また、全長385mmと小型なので卓上で気軽に動かすことも可能です。
ROS 2パッケージを利用すると、たとえば次の動画のようにボールを掴んで移動させるような動作を簡単にプログラミングできます。
CRANE+ V2の詳細な特徴については、下記の製品ページをご覧ください。

CRANE+ V2は下記の販売ページから購入できます。シミュレータを含むROS 2パッケージは無償で公開しているため購入前の参考にご利用ください。

Humble版の変更点
CRANE+ V2のROS 2パッケージがHumbleに対応しました。
Foxy版のパッケージが必要な場合はfoxy-develブランチを参照してください。ただし、2023年6月にROS 2 Foxy FitzroyがEOL(サポート終了)を迎えました。それに伴い、CRANE+ V2のROS 2パッケージもHumble版をメインにメンテナンスしていく予定ですのでご注意ください。
Humble版ではサポートするロボットシミュレータに変更があります。従来のGazebo classicのサポートを終了し、新しいバージョンであるGazeboのみのサポートとなります。そのため、crane_plus_gazeboを削除し、crane_plus_ignitionの名称をcrane_plus_gazeboに変更しています。
インストール方法
CRANE+ V2のROS 2パッケージのインストール方法については、crane_plusのREADMEをご覧ください。
また、CRANE+ V2のHumble版パッケージはリリース作業を終えていますので、ROSのリポジトリに反映され次第、下記のコマンドでもインストールできる予定です。
sudo apt install ros-humble-crane-plusパッケージのソースコードは下記のGitHubリポジトリで公開しています。
さらに、少ない手順でCRANE+ V2の動作環境を構築できるDocker imageも公開しています。ご興味のある方はREADMEをご覧ください。
実機の動作手順例
実機のCRANE+ V2を動かす場合はUSB通信ポートの設定を行う必要があります。crane_plus_controlのREADMEの手順に従って設定を行ってください。
CRANE+ V2は下記のコマンドで起動します。
ros2 launch crane_plus_examples demo.launch.py port_name:=/dev/ttyUSB0別の端末を立ち上げて下記のコマンドを実行するとグリッパが開閉します。
ros2 launch crane_plus_examples example.launch.py example:='gripper_control'シミュレータの動作手順例
ロボットシミュレータGazeboを用いることで、実機を使用せずにアームの動作をシミュレーションすることも可能です。
シミュレータは下記のコマンドで起動します。
ros2 launch crane_plus_gazebo crane_plus_with_table.launch.py別の端末を立ち上げて下記のコマンドを実行するとグリッパが開閉します。
ros2 launch crane_plus_examples example.launch.py example:='gripper_control' use_sim_time:=true
おわりに
本記事ではCRANE+ V2のROS 2パッケージHumble版を紹介しました。実機のCRANE+ V2を動かすだけではなく、シミュレータ環境やDocker Imageも用意してありますので、これからご購入を検討されている方はぜひご活用ください。