
前回の記事では、HAC用拡張モジュールの全容を公開しました。今回からは、その詳細な製作方法を書いていきます。
拡張モジュールの3Dデータはこちらに公開しています。Readmeには印刷方法などの詳細を記していますので製作前にご確認ください。
3Dプリンタで印刷直後のモデルがこちらです。Readmeに付記してありますが、密度10%程度のABSなどで、軽量化を意識した印刷を推賞します。私の製作時には、プリントパーツ総重量が270gとなりました。

印刷したパーツ達
サポートを全て除去したら組み立てていきましょう。他の部品とのはめ合い等が生ずる箇所にはサポートがつかないような積層方向となっていますが、穴部や角のサポートは綺麗に除去しておくことで組み立てをスムーズに進めることができます。
Webカメラの分解
まずは、Webカメラを分解し、ロボットに用いる際に不必要なパソコンへ装着するスタンドなどを取り外していきます。メーカー保証外となりますので自己責任で行ってください。

カメラスタンド
カメラの下部についているスタンドがこれです。ロゴの位置などで、お手持ちのものと照らし合わせていただければわかりやすいです。すでに取り外してしまったので、カメラ本体抜きでの説明となりますが、特に難点は無いかと思います。
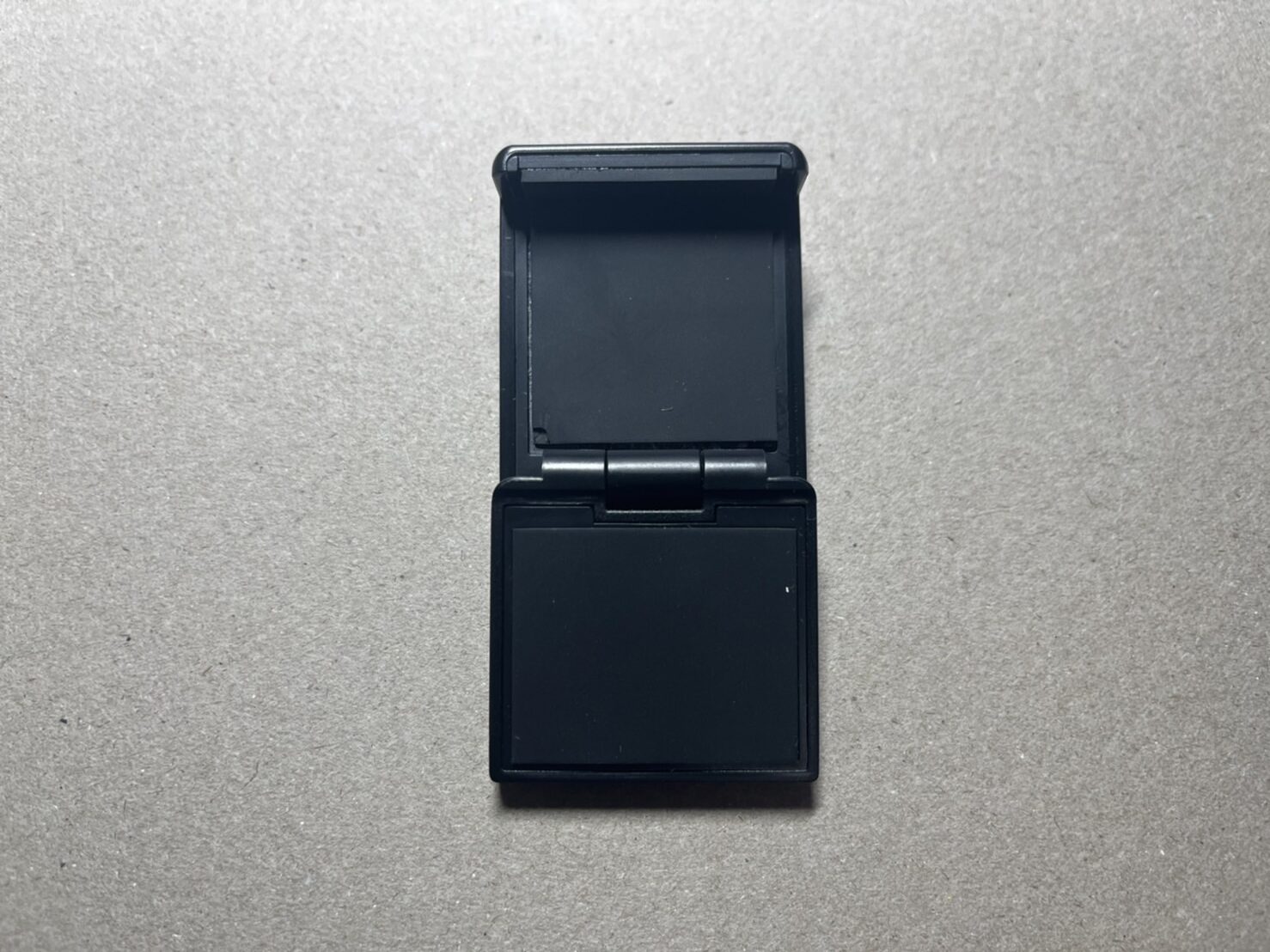
スタンドを開く
まず、スタンドを最大限開きます。上部(ロゴがついている側)と下部(ロゴがついていない側)それぞれにゴム製のすべり止めが接着されています

ゴムシートを外す
このうち、上部のゴムシートを外してしまいます。隙間なく接着されているので、素手で外すのが難しい場合はけがに気を付けながらマイナスドライバーやカッターでこじってください。

四隅の小ねじを外す
外すと四隅に+ねじがあるので、0番のドライバーで4つ全てを外します。

スタンドを上下に分解する
4つのねじを外すと、ねじの締結が無くなりスタンド部の最中構造を二つ割りにすることができます。中心部に+ねじがあり、これがカメラ本体との間にあるボールジョイントを固定しています。

中心部のねじを外す
1番のドライバーでこの中心部のねじも外します。

分解完了
するとボールジョイントも外すことができ、カメラ本体をスタンドから分離できます。いずれWebカメラとして再利用する可能性が少しでもあれば、外した部品とねじはどこかに保管しておきましょう。
これにてカメラ側の準備は完了です。
モジュールの組み立て
モジュール本体の組み立てに移ります。

カメラの組み込み
スタンドを外したカメラを、印刷したケースにはめ込みます。ケーブルは後ろの穴から引き出して下さい。また、はめ込みがきつい場合は以下の手順で解消してください。
- カッターややすりでケース内側を削る
- 1が困難な場合は、ケースのみ縮尺をわずかに拡大し印刷する。(1.005倍程度)

カメラの組み込み
はめ込んだら、ケース四隅を2×8タッピングねじで固定します。

Raspberry Pi zero 2WとUSBハブの組み込み
次に、Raspberry Pi zero 2WとUSBハブをケースにはめ込みます。
これについても、はめ合いが合わなければ上記の方法で解消してください。また、Raspberry PiとUSBハブは、どちらも搭載方向が決まっています。基本的には画像と同様に、Raspberry PiのMicroSDカードスロット、USBハブのケーブルどちらも画像の奥側となるように差し込んでください。

Raspberry Pi zero 2WとUSBハブの組み込み
はめ込めたら、裏蓋を2×8タッピングねじ8本で閉じます。後のRaspberry Pi拡張基板作成、配線の際に外すので、本来は8本ですが今の段階では2本程度での仮止めにします。

モジュール基部の装着
次に、頭部パーツと首のプラスチックスペーサを外したKXRの胴体上面に、モジュールの基部を装着します。もともと首のプラスチックスペーサを固定していたM2.6のねじを6本用いてしっかりと固定します。

モジュールの搭載
KXRにモジュール基部を搭載後、ここにRaspberry PiとUSBハブをまとめたケースを装着します。

モジュールの搭載
3×8?10タッピングねじ4本を用いて四隅を固定しましょう。
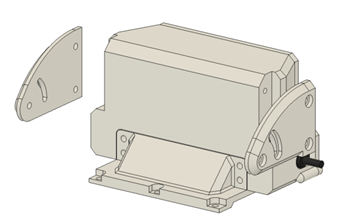
カメラアームの取り付け
カメラアーム2枚を、左右から固定します。3×8?10タッピングねじを左右それぞれ2本ずつ用います。

カメラの取り付け
アームを取り付けたのちカメラを差し込み、まずはカメラ前面よりのねじ穴に3×6?8タッピングねじを締めてください。さらに、湾曲した長穴にも同様のねじを差し込み、奥のねじ穴に締めてください。後にカメラの角度を調整するので、この時の締め方は緩めで構いません。
これにて拡張モジュールの組み立ては完了です。
次回
ここまで進めば、前回記事で紹介したこのKXRの外観が完成していると思います。

改造後のKXR
次回の記事では、ユニット内部のRaspberry Pi拡張基板の製作と、ロボット全体の配線作業について解説します。

